


Pour le moment le Wiki pour l'utilisation de la prise RJ45 afin d'utiliser la Simucube étant vierge d'info, je vais vous faire pars de mes "recherches".
edit : désormais il y a des infos ici : https://granitedevices.com/wiki/SimuCUBE_pinouts_and_wiring
Le but étant de finir mon pédalier DIY et de pouvoir enfin en profiter.
Pour info, il existe 2 méthodes de câblage des prises RJ45:
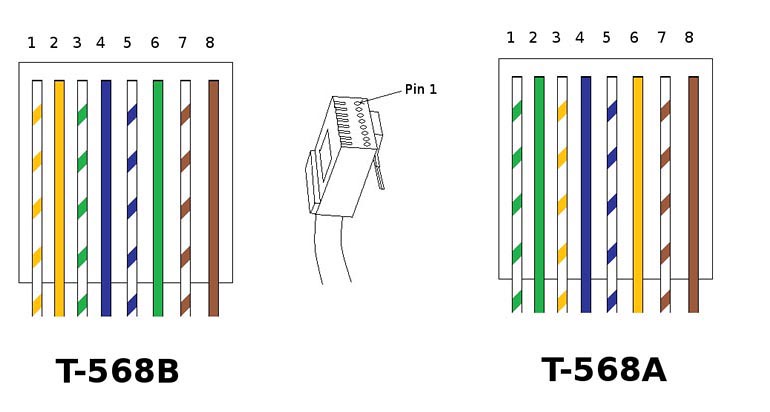
La version A est normalement pour les câbles non blindé, et la B pour les blindés.
Mais il est préférable de contrôler avant de continuer.
La prise RJ 45 pour le branchement d'un pédalier et la X11 supérieur, soit celle de droite en haut.
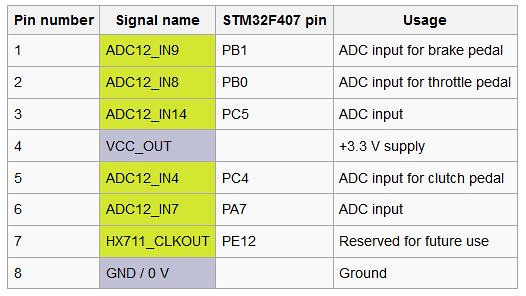
Le tableau de branchement par GD:
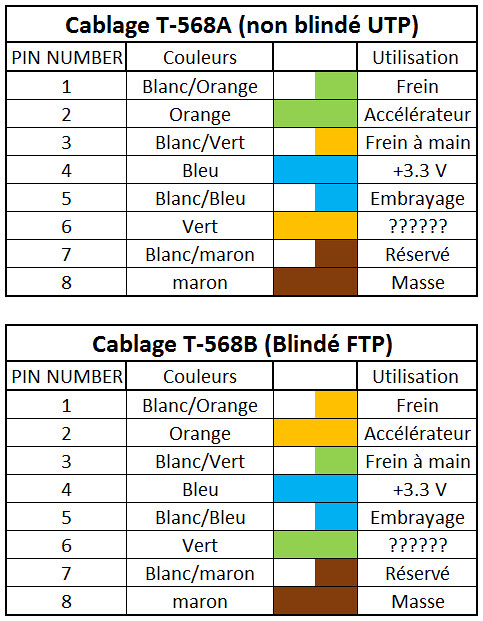
Et mes tableaux en fonction des 2 types de câbles réseau: (à vous de trouver celui qui correspond à votre câble)
Maintenant qu'on y voie un peu plus clair sur la fonction de chaque fil, on peut commencer à mettre les mains dans le cambouis.
En toute logique, pour commencer à voir comment se comporte le chantier vous branchez un potar de la sorte vite fait:
Le + d'un coté (ici à gauche) le moins de l'autre (donc à droite) et le signal (ou curseur) au milieu.
Les autres fils, inutiles pour le test, n'étant pas branchés.
Ensuite vous vous rendez sous MMOS, et vous vous attendez à voir bouger une barre ...
Et là, c'est la cata !! Les 4 barres bougent dans tous les sens !! ![]()
Forcement contrôle du branchement (OK), changement du câble (OK) et toujours aucun signal digne du nom !! ![]()
Le problème est simple, il y a des parasites sur les fils d'entrés qui génères des oscillations au niveau de la lecture du signal.
La solution est simple, TOUS LES FILS d'entrés (IN) doivent être relié au + ou au - (aucune importance) afin de bloquer le signal.
A partir de ce moment, un seul axe est fonctionnel et les autres sont parfaitement bloqués.
Après avoir fait un étalonnage, il seront soit à 0%, soit à 50 %, soit 100 %, ça dépend un peu du sens du vent...
Test d'un effet hall A1302:
Malgré la tension de fonctionnement annoncé à 4.5 V mini, cela fonctionne très bien en 3.3 V
Par contre, la lecture n'est pas proportionnel à la distance, il est donc impossible d'utiliser ce composant comme potentiomètre en jouant sur l'écartement d'un aimant avec la cellule. ![]()
Pour la pédale de frein, je compte utiliser un capteur de pression monté sur la durite inox. Idem, le capteur est donné pour une tension de 4.5 V mini.
(tous les fils d'entrés sont relié ici au +)
Dans la pratique, le capteur fonctionne très bien en 3.3 V ![]()
Par contre , j'arrive assez facilement au max en poussant la pédale, il semble sous dimensionné, Je passe donc d'un capteur 1000 psi à 1600 psi. (en attente de livraison)
J’espère que ça vas suffire, car les 2000 psi ne sont plus du tout dans la même tranche de prix !! ![]()
Les tests indépendants de technologie étant fait, il faut maintenant trouver à quoi correspondent tous les fils par rapports aux barres sous MMOS.
Nouveau petit montage: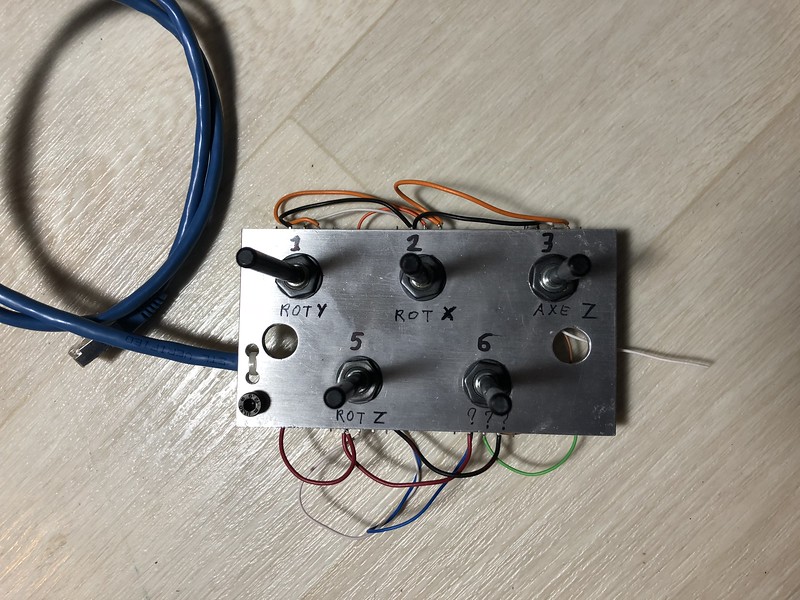
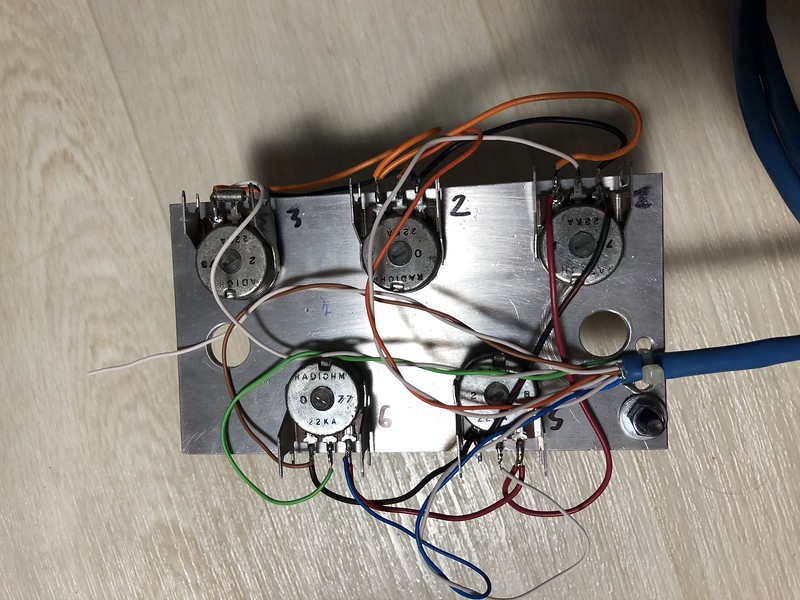
Les numéros correspondent au pin number du tableau tout en haut et j'ai repris les termes utilisé sous MMOS pour savoir à quel barre cela correspond.
Le fil N°6 n'est pas exploité pour le moment, le N° 7 est clairement définis comme évolution futur.
Il n'y a donc que 4 entrées fonctionnel à ce jour, parfait pour un pédalier plus un frein à main. ![]()
Les potentiomètres sur ce montage sont des 22 K Ohm, celui utilisé seul plus haut est un 2.2 K Ohm, la valeur utilisé est sans grande importance. (Ne me demandez pas pourquoi moi je suis fraiseur !!)
Pour info LeoBodnar donne un plage de 1 K à 100 K pour le branchement d'un potar sur son module BU0836.
Si jamais l'évolution de la barre se fait à l'envers par rapport à la rotation du potar, il suffit simplement d'inverser le branchement du + et du -.
Vous constaterez que la tresse du câble réseau est branché à la masse de la platine, mais sur le pédalier elle ne doit pas être branché!! Uniquement à la masse coté prise Simucube.
Et comme d'hab, comme on chasse les lutins EMI ![]() , tant qu'a faire, au-temps utiliser un câble blindé...
, tant qu'a faire, au-temps utiliser un câble blindé...
Techniquement il est peut être (probablement) possible de reprendre directement les potars d'un pédalier de G25/G27, mais ne connaissant pas le produit je ne garanti rien.
Sous le soft SimuCube Configuration:
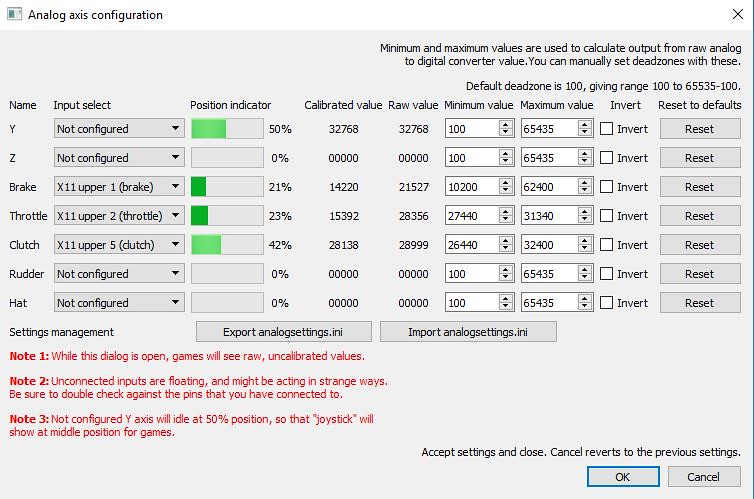
Il suffit de valider les axes utilisés dans "Input select", le plus simple est de mettre le frein avec le frein etc etc ...
Ensuite pour régler "Minimum value" il suffit de regarder la valeur dans "Raw value" (sans toucher les pédales) et de rajouter 50 afin de bien avoir 0%
Pour régler "Maximum value", il suffit d'appuyer à fond sur la pédale, regarder la valeur en "Raw value" et d'enlever 50 ou 100 pour être sur d'être à 100 %
Et voila, affaire classer. Et pas besoin de passer par le driver sous Windows pour étalonner. ![]()
Voili voilou,
C'est un peu brouillon, y'a des améliorations à apportés, mais l'essentiel des infos sont là pour vraiment exploité cette entrée X11 Upper. ![]()
Si vous avez des remarques ou suggestions, pas de soucis.