


Bonjour à tous,
Après une longue hibernation coté simu auto, me revoici ![]()
L'envie de réinstaller mon simulateur remisé au grenier depuis 5ans commence à se faire sentir.
Lien vers mon ancien sujet : http://www.racingfr.com/forum/index.ph…ic=39231&st=200
Le voici à l'époque dans sa version 1.0 :
Et en photo :


Pour la V2.0, on va garder le même chassis de base, surement pas optimisé au poil de luc comme certain, mais tant pis ça le fera quand même et au moins il sera terminé.
Voici la liste des modifications qui vont être effectués :
- Remplacement des moteurs d'essuie-glaces 12V par les fameux moteurs Smolka (Valeo 404.458) en 24V
- Ajout d'une plaque de MDF de 22mm sur la partie fixe pour recevoir les nouveaux moteurs et l'électronique
- nouvelles manivelles en alu usiné par un pro
- nouveaux supports pour les potards
- modification de la position de conduite, ajout du T500RS
- remplacement des 3 écrans 23" par un seul de 40" (beaucoup plus WAF ready)
- support pour Oculus Rift CV1 (parce que la VR ça dépote grave quand même ! )
Voilà c'est déjà pas mal pour une V2, en gros un simu plus puissant, beaucoup plus fiable mécaniquement, et avec un équipement de simracing plus évolué.
--------------------
Mon avancement sur la V2.0 (mise à jour le 12/02/2018) :
Voici les opérations effectuées, décrite le plus précisément possible pour me servir d'aide mémoire et également aider les autres, sait-on jamais ![]()
Matériel utilisé :
- Arduino Uno
- Sabertooth 2x32A
- Alimentation 24V 20A
- 2 moteurs smolka 24V avec masse déconnecté TUTO Supprimer la masse des moteurs Smolka
- 2 potentiomètres PPC27
- 1 PC sous W10 X64 fraichement installé
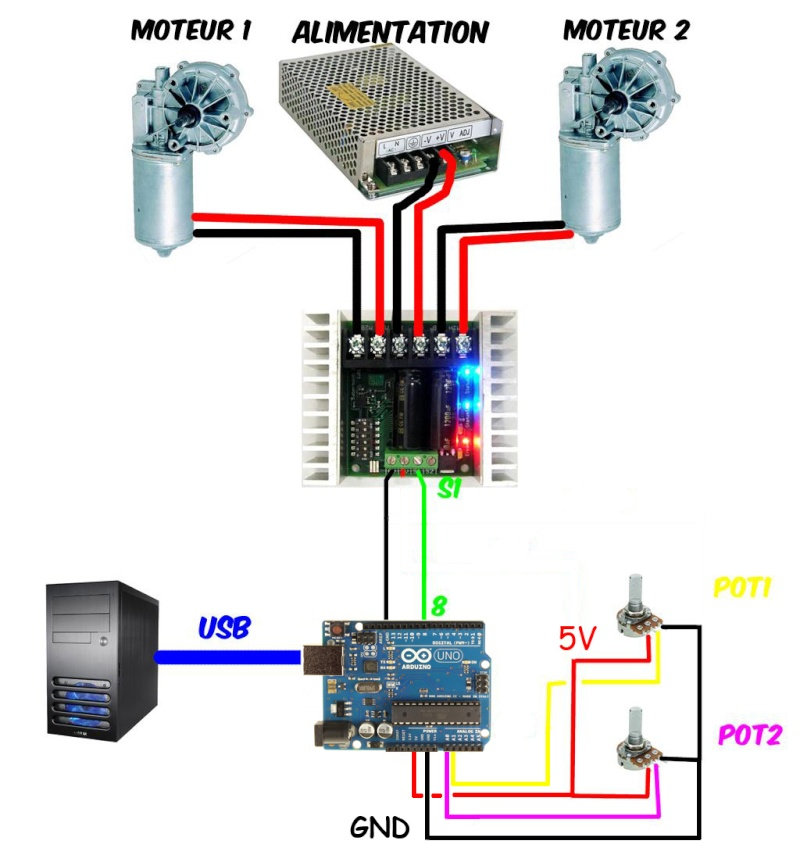
1 / Câblage effectué avec ce schéma :
2 / Téléchargement et installation des softs :
- XPID Simtools 1.6 4 motors Uno
- Simtools 2.2 avec licence DIY
3 / Programmation :
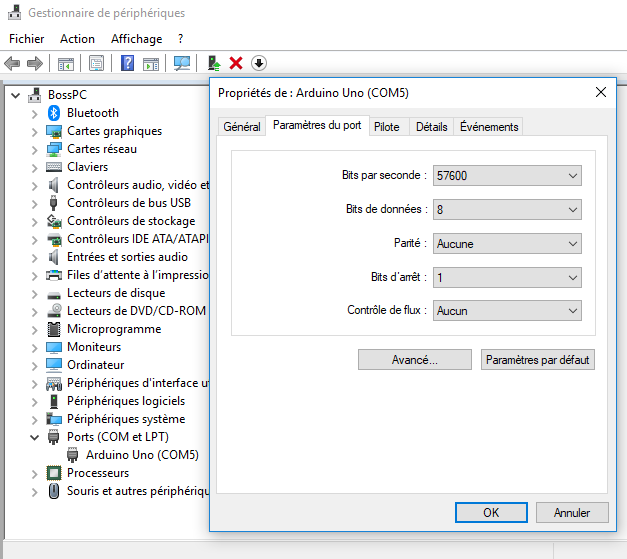
- Branchement de l'arduino sur le PC en USB (COM5)
- Aucune modification du code, compilation et téléversement dans l'arduino
- Configuration du port COM dans le gestionnaire de périphérique :
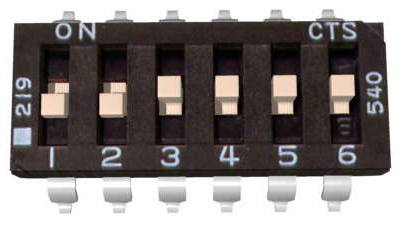
- Configuration des cavaliers de la sabertooth avec le 1 et le 2 sur OFF (115200 baud) :
- Lancement de Plugin updater, mise en place des plugins et patching des jeux (Assetto corsa, Raceroom et Dirt Rally)
- Activation de la licence DIY
- Lancement de GameManager et GameEngine, synchro vert OK
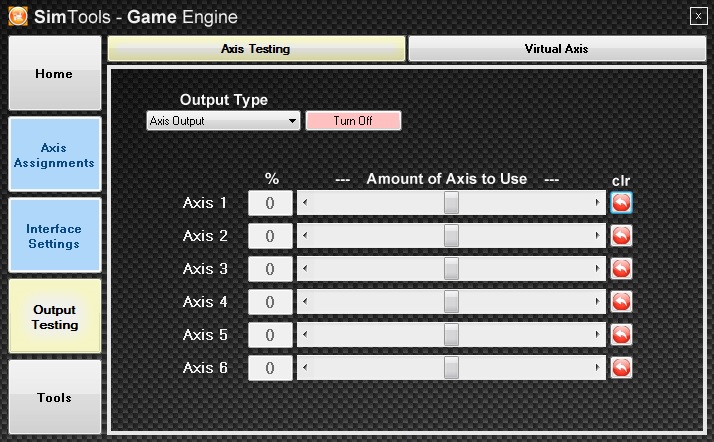
- Configuration de GameEngine :
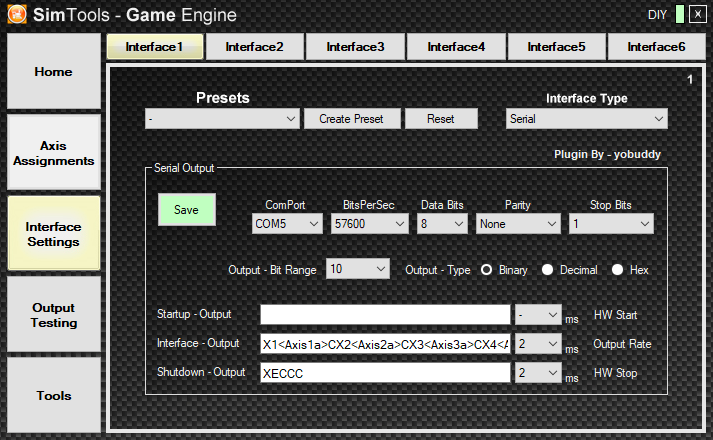
- Save de la config
- Dans Output Testing, je fais Turn On et sélectionne Axis Output, je bouge un peu les sliders des Axis1a : Ça fonctionne !
- Procédure de calibration Moteurs / potards :
Pour calibrer (par calibrer j'entends mettre la manivelle en position de départ lorsque le potentiomètre est à sa valeur moyenne) voici la méthode la plus simple :
- Tu fais en sorte que les roues dentées du potentiomètre et du moteur ne sont pas en contact.
- Tu lances output testing dans Simtools sans toucher aucun slider (les potentiomètres vont essayer de se mettre en position moyenne = 512)
- Tu fais tourner le potentiomètre doucement qui va avoir pour effet de faire tourner la manivelle plus ou moins vite
- Une fois ta manivelle en position souhaitée et le potar en position moyenne (plus de mouvement de la manivelle), tu refais contact entre les roues dentées.
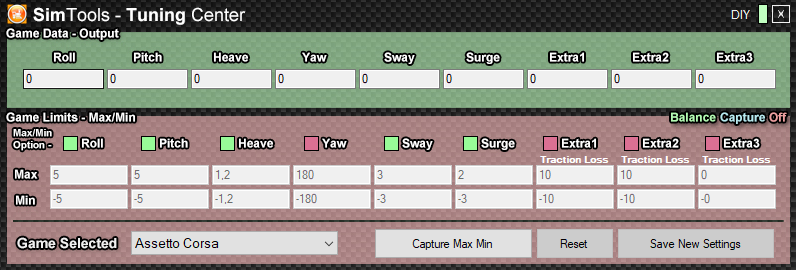
- Liste des effets sous Simtools :
Sway: force latéral se sont les G que tu prend sur le coter (ex :virage)
Surge: force longitudinale les G pris devant et derrière (ex :accélération / freinage )
Pitch: inclinaison du véhicule devant et derrière (monter/descente)
Roll:inclinaison du véhicule gauche/droite (vibreur/dénivellation de la piste)
Heave: effet vertical se que l'on ressent avec les suspensions (trou/saut)
Yaw: rotation à 360° du véhicule (ex : virage)
Sur un 2dof on met en général que 5 effets ,sway surge pitch roll heave , le yaw est inutile pour moi car ne peu reproduire une rotation avec un cardan.
4 / Tests fonctionnels :
Voici la vidéo test :
Et les effets activés :
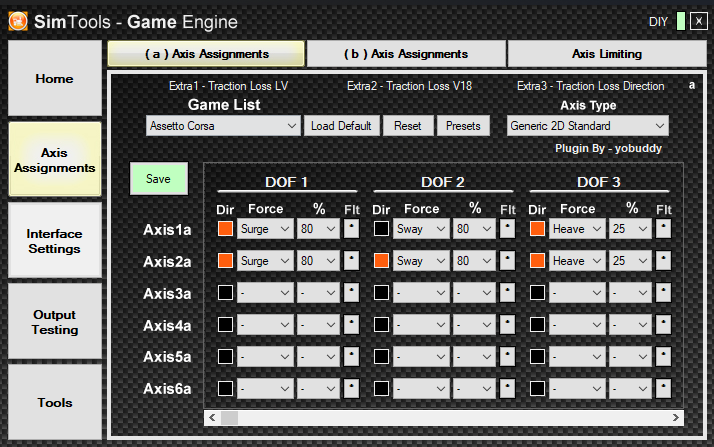
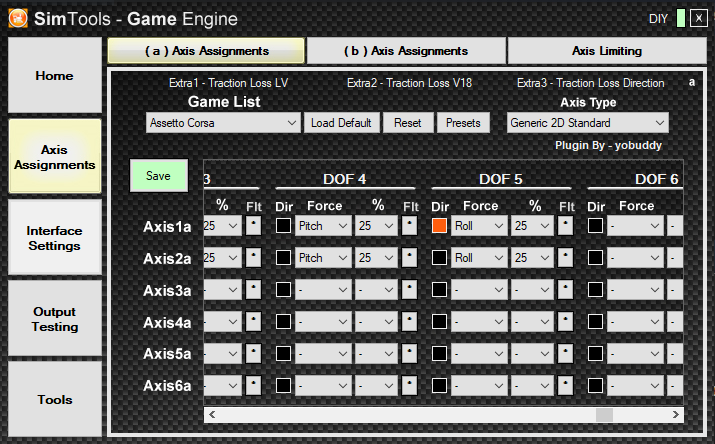
J'ai donc 5 effets d'activés :
- Sway 80%
- Surge 80%
- Heave 25%
- Roll 25%
- Pitch 25%
IMMENSE MERCI A WANEGAIN ET AUX MEMBRES DES FORUMS PCSHM ET RACINGFR POUR LEUR IMPLICATION ![]()
![]()
![]()




