

Et encore le pire c'est reddit la c'est la merde intégrale c'est imbitable ce truc

DIY - tensionneur de harnais 2 DOF avec PTMover/simHub
-
-
-
avec un renvoi d'angle
")
il faut que les deux biellettes soient parallèles avec le renvoi au milieu
Non t'as pas compris parce que je me suis mal exprimé

Je pense utiliser le moteur dans les 2 sens : le frein tire le harnais et l'accélération pousse une palette. Mais je ne peux pas faire les 2
 . C'est histoire de rentabiliser les moteurs
. C'est histoire de rentabiliser les moteurs -
Si c'est pour trouver des servo qui aient du couple, faire une démultiplication ?
External Content youtu.beContent embedded from external sources will not be displayed without your consent.Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy. -
Et ce genre de motorisation ?
External Content youtu.beContent embedded from external sources will not be displayed without your consent.Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy. -
Bon, la plupart des choses que j'ai configuré hier ont disparu aujourd'hui dans SimHub...
Et mon compte n'est toujours pas validé pour pouvoir discuter sur discord

Et quand je fais un export de ma config, ça ne prend pas en compte les sliders, je n'ai plus que les titres

-
Je me lancerais bien mais je préférerais utiliser simhub plutôt que ptMover histoire de ne pas rajouter une carte et un soft.
Le lien vers le discord qui traite visiblement du sujet ne fonctionne plus. Est-ce que quelqu'un ici utilise ces servos avec simhub ?
-
J'ai tenté mais les réglages du concepteur sont sur smt32 bluepill, j'ignore si c'est différent sur Arduino normal.
Sur Flypt ça fonctionne bien, sauf si tu actives les G latéraux, dans ce cas il ne serrera que d'un côté quelque soit le virage.
On était plusieurs à avoir eu ce bug, je n'ai pas retesté depuis un mois, ça à peut être été corrigé depuis.
-

Je me lancerais bien mais je préférerais utiliser simhub plutôt que ptMover histoire de ne pas rajouter une carte et un soft.
Le lien vers le discord qui traite visiblement du sujet ne fonctionne plus. Est-ce que quelqu'un ici utilise ces servos avec simhub ?
il y a blekenbleu qui utilise Simhub voir dans ce topic :
https://www.racedepartment.com/threads/2dof-h…ptmover.194331/
-
Je savais qu'un tensionneur de harnais rajouterais de l'immerssion, mais je vois, d'après les retours (en particulier sur RD), que ça dépasse souvent nos attentes.
Du coup, je pense m'en faire un moi aussi.
Par contre, il y a un truc que je ne pige pas trop, beaucoup de montages DIY que je trouve font de l'asservissement de position, je me trompe ?
Pourtant, c'est comme pour un volant, il faut un retour de force, donc un asservissement du courant.
Avec des servos RC, il faut virer le contrôleur (quand il est à part) et ne garder que le pont en H que l'on asservit grâce à un capteur de courant et une carte type arduino.
Comme j'ai la flemme de lire toutes les pages, vous savez si ça a été fait ?
EDIT: et côté export des données, les softs sont au point (simhub, PTmover, ...) ? Même pour le différentiel (avec deux moteurs distincts) ?
Etienne, un avis ?
")
-
hello Mizoo
J'ai fait un tensioneur de harnais avec un vieux volant G25 pilote par simhub. Simplissime et cela fonctionne tres bien.
J'utilise le g25 tel quel, je suis juste branche en direct sur les moteurs. Ainsi je beneficie du systeme d'engrenages existant et du boitier du G25 avec son montage rapide...
-
Je n'ai testé qu'une fois un tensionneur de harnais, mais c'était passif (attaché sur un point fixe, c'est le pitch qui induisait la tension) mais j'ai trouvé ça très désagréable, sans doute parce qu'il était trop fort, mais peut être aussi parce que ce n'est pas si réaliste que ça (en vrai on sent la tension du harnais sur l'avant du corps, mais on n'est pas plaqué vers le siège, au contraire).
Un peu comme le GSeat, ça ne m'a jamais attiré (mais je n'ai jamais testé).
Mais bon, je reste ouvert, et chacun ses goûts. Ayant bossé sur des gros 6 dofs rapides avec beaucoup de débattement, je suis très difficile et je reste adepte du pitch/roll pour les accélérations continues (précédés par des translations)...
Pour ce qui est de l'asservissement en couple plutôt qu'en position, effectivement ça semble plus logique, mais je ne sais pas si ça a été fait. Et si entre le harnais et le moteur il y a un ressort, avec un asservissement en position au final ça revient au même.
-

en vrai on sent la tension du harnais sur l'avant du corps, mais on n'est pas plaqué vers le siège, au contraire.
C'est ce qui m'intrigue aussi.
Sur le G-Seat à l'arrache qu'on avait fait au boulot on relâchait la pression dans le dos.
Il faudrait donc faire un sorte que le corps ressente plus de pression sur la poitrine que dans le dos, alors que le harnais le plaque justement vers le dossier.
Je suppose que comme la surface de contact du harnais est bien inférieure à celle du siège, c'est ce différentiel qui doit flouer le cerveau, ou pas...
Il y en a qui ont fait un système DIY avec deux moteurs (distincts) ?
-
Moi c'est commandé en force. Pour ce qui est de commandé deux moteurs distincts, c'est pas infaisable.
-
Autre chose qui me parait contre-intuitif.
Sur certains montages le système de traction est fixé au châssis, et non au siège. Ce qui fait qu'avec un dossier qui n'est pas hyper rigide il aurait tendance à s'incliner vers l'arrière au freinage, ce qui est contre-productif.
LeboisVR: si tu parles de ce système là, il n'y a pas d'asservissement de courant, tu ne commandes que la tension au borne du moteur, sans rétroaction. Après, on pourrait dire que comme le moteur ne tourne pas (ou peu) on peut négliger la fcem et considérer que la tension est l'image du courant, mais dans les faits il y a quand même une différence.
La commande double me semble importante quand on n'a pas d'autre dispositif dynamique. Mais je n'ai pas testé.
Vous avez des bons plans pour des harnais 5 points ? ou vaut-il mieux se le faire avec des sangles ?
-
sur ali il y en as des pas cher!!
-
Je me suis fait un tendeur de harnais dynamique 2 DOF et je confirme qu'en étant dynamique ça change absolument tout !
Le ressenti du freinage est impressionnant, on peut beaucoup plus facilement faire des freinages dégressifs car on sent assez précisément la force du freinage et dès qu'on freine un peu moins ça remonte tout seul.
Dans les virages c'est pareil, on sent bien la force du virage sur l'épaule concernée !
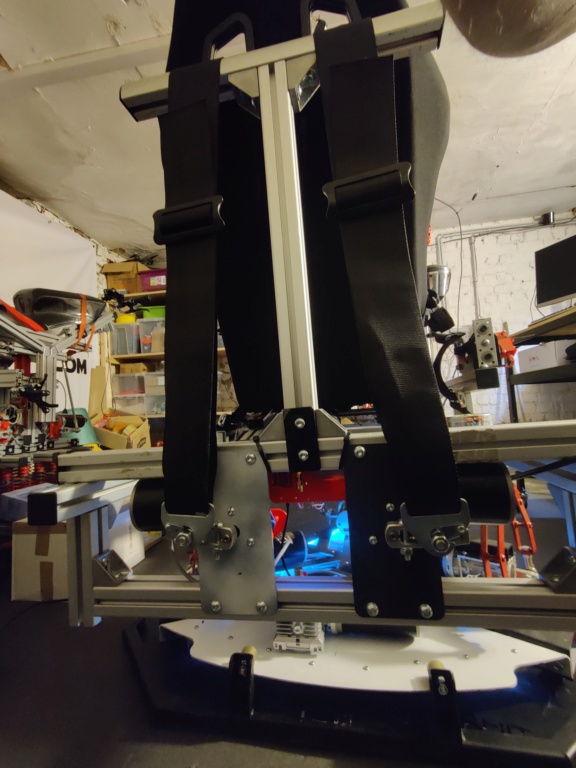
Une vidéo (faite à l'arrache) où on voit tout en fonctionnement :
External Content youtu.beContent embedded from external sources will not be displayed without your consent.Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy.J'ai gardé le principe de commande en position des moteurs et chaque moteur est indépendant.
EDIT : j'utilise une harnais 4 points mais je me demande si un 5 points ne serait pas plus efficace pour bien tenir le harnais tendu à l'avant...
-
Oui, 5 points a du sens, pour éviter que les sangles ne remontent.
Tu utilises quoi comme moteur pour le tendeur ?
Vous connaissez des moteurs réductés qui ont fait leurs preuves ? Sur ali, comme d'hab, on trouve de tout et n'importe quoi.
Car j'allais peut-être partir sur des gros servo RC mais comme je compte virer la partie commande électronique pour avoir un vrai contrôle, autant me contenter d'un moto-réducteur. Surtout qu'ici l'encombrement n'est pas un problème.
EDIT: on trouve des moteurs "pour tricycle, scooter " 200-300W soit disant réducté mais ils fournissent à peine 1 N.m car ils sont fait pour tourner vite. Soit moins qu'un servo 35kg.cm.
EDIT: il y a ces mabushi (des vrais?) RS775 réductés, en configuration 31 kg.cm / 30 rpm sous 24V. Il faudrait que je fasse un petit montage avec le Mige pour voir de combien on a vraiment besoin.
-
J'utilise mes moteurs 120w. J'ai également des servo 40kg.cm (ou 35 peut être) mais comme ça allait être un peu plus galère à mettre en place avec les mini manivelles de ces trucs que j'ai préféré partir sur une solution où j'avais tout sous la main...
Les moteurs que j'utilise sont ceux-là : https://simukit.com/fr/moteurs-et-…20w-gauche.html (un gauche et un droit), piloté par un Arduino et une Sabertooth 2x32.
Les manivelles ont un entraxe de 45mm et c'est un peu trop, ça tire assez fort sur les épaules quand même (on est bien plaqué contre le siège).
Dans mon code Arduino j'ai fait en sorte :
- définir le % à utiliser pour la partie accélération (actuellement j'ai mis 20%) : cela veut dire que j'ai 20% d'amplitude lors d'une accélération, donc le harnais se détend mais cela veut également dire que lorsqu'on est à l'arrêt les manivelles des moteurs seront vers le haut, ce qui donne une plus grande plage pour le freinage et donc une plus grande précision...
- définir le % à utiliser pour le harnais opposé à celui qui doit se tendre en virage (je fais des tests à 30%) : cela veut dire que par exemple lorsque je tourne à droite je vais avoir le harnais de gauche qui va avoir 100% d'amplitude sur l'effet et celui de droite va se tendre à 30% de l'amplitude du harnais de gauche.
Je ne sais pas si j'ai été clair...
EDIT : je pense peut être mettre un ressort entre les manivelles et les harnais
-
Mizoo regarde si tu veut pas acheter chez alis
-
