


Salut à tous, je suis en train de plancher sur un setup complet DIY, et j'aurais quelques question concernant le volant.
J'en suis encore à l'étape de conception, il me reste quelques composant à recevoir, d'autres à fabriquer, et je pourrais commencer à câbler/tester tout ça.
Niveau électronique, j'aimerais bien utiliser une léonardo ou une discovery, n'étant pas un cador en programmation, il me faut un firmware qu s'accordera avec le Vesc sans trop de modification de bourrin.
J'me suis procuré un moteur brushless comme celui-ci. Je compte le monter en DD.
https://www.alibaba.com/product-detail…0072432165.html
Le moteur est une version "beta", il ne comporte pas d'encodeur. (en cours de dev) .. donc c'est juste une cage, un rotor, du cuivre et 3 pins au cul.
en encodeur j'ai un E6B2CWZ6C OMRON 1000P/R
https://www.aliexpress.com/snapshot/0.htm…tId=32961497880
Apres discussion avec un pote fana de modélisme, ce dernier m'oriente vers un ESC pour piloter le moteur.
C'est en fouillant sur le net que je tombe sur le sujet de Carlton DIY - [MMOS + VESC] Création d'un firmware FFB pour VESC
et c'est ce meme esc que j'avais repéré compte tenu de son coté open source.
Ma premiere question: est-ce que cette configuration vous parait faisable? à t'elle un sens à vos yeux? (efficacité / simplicité de montage / sera joué par des enfants 11/13ans).
(perso je sais pas du tout ou je vais avec cette config ![]() )
)
J'imagine qu'avec le recul que vous avez dans le domaine, certaines choses vous paraissent bien ou aberrante sur ce projet, j'aimerais avoir votre avis s'il vous plait.
Ma deuxième question: concerne le rapport cogging/encodeur, je n'ai pas encore bien compris l'histoire du cogging par rapport au p/r. Plus on a de p/r, plus la précision est au rdv et le cogging moindre ??
le cogging n'est pas la résistance naturel du moteur? (vous savez, les accoups magnétiques lorsque l'on tourne le rotor à vide).
Ma dernière question concerne l'alimentation du Vesc. Rassurez moi, il peux fonctionner sur une alim 24V? (d’après mon pote oui) mais j'aime bien recouper ![]()
Vesc : https://fr.aliexpress.com/item/400043882….67ee6c377izz3n
Alim 24V /10A : https://fr.aliexpress.com/item/100500179….27426c37Sm6gUZ
Voila, excusez moi pour ce pavé d'introduction, mais comme vous l'avez constaté j'ai plein de questions .... et encore, je me suis pas trop lâché ![]()
Merci d'avance pour vos réponses,
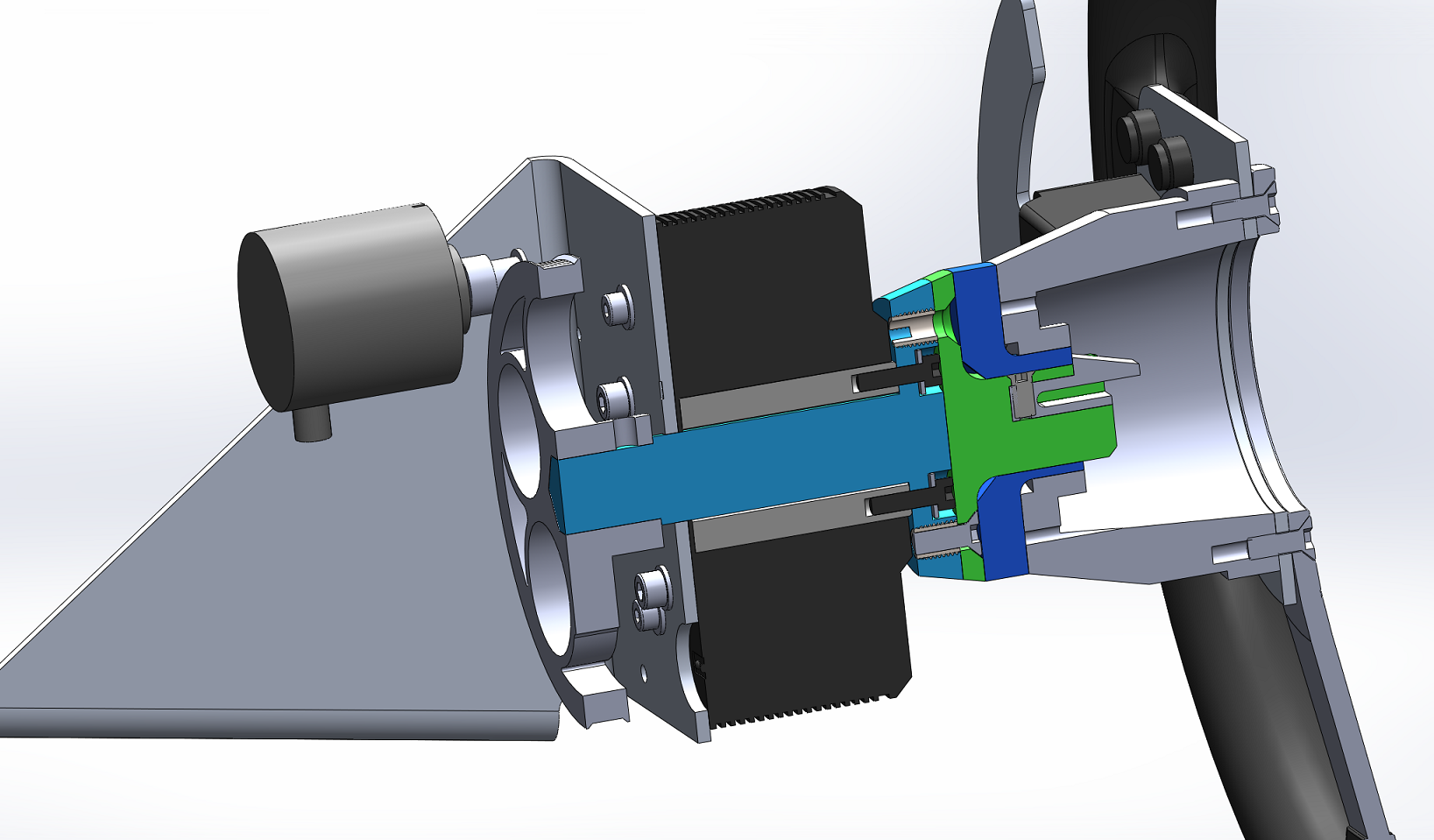
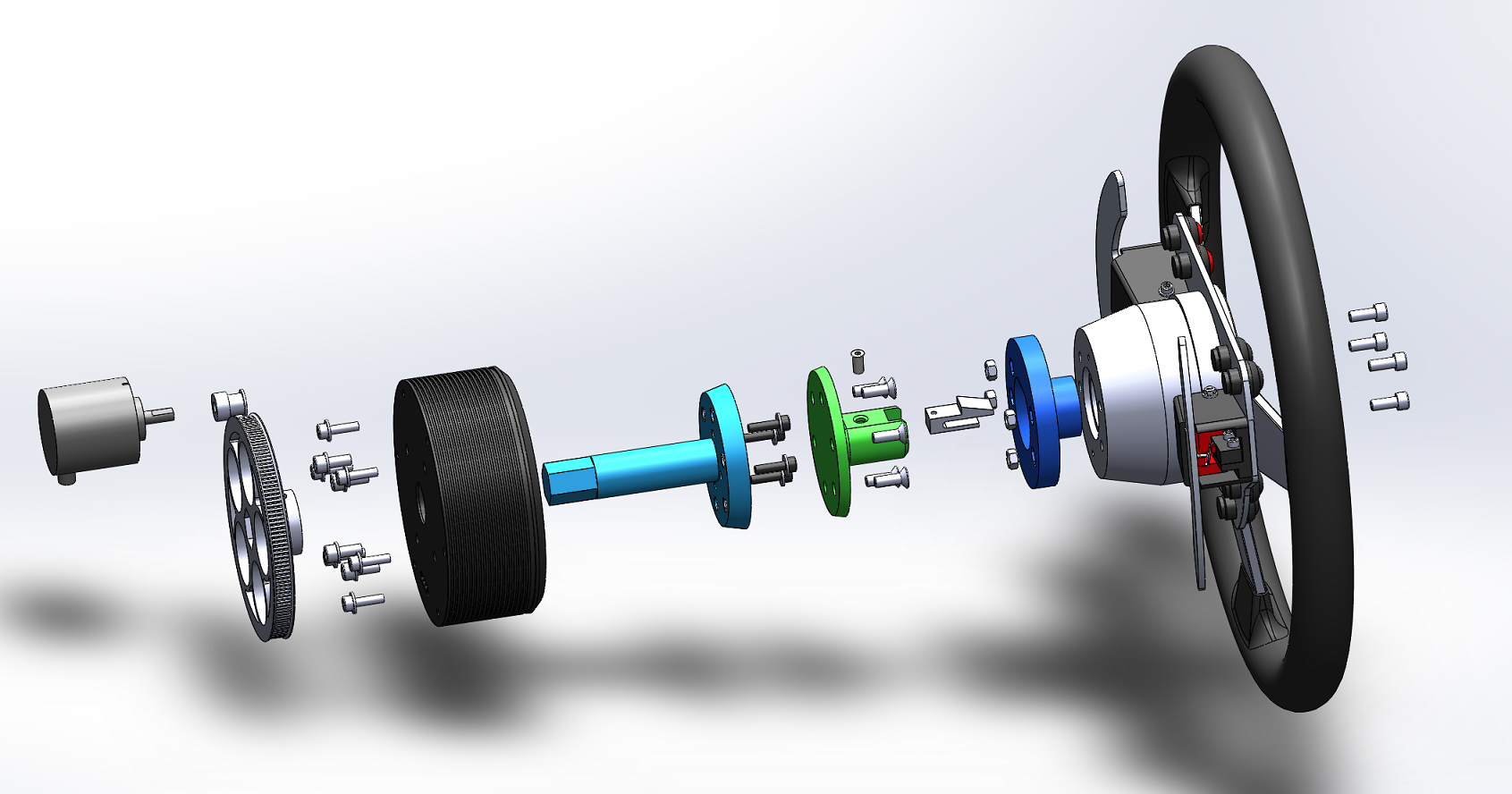
Aller, une petite photo de la CAO.
 ">
"> ">
">