bonjour à tous !
je me suis lancé sur les traces de Lipide512, merci à lui pour son tuto génial et ses coups de main !

Vous trouverez toutes les explications de mon projet de Playseat dans ce premier message du post (car je l'ai mis à jour au-fur-et-à-mesure  ).
).

Le concept :
Un simulateur dynamique qui embarque le pilote, le siège, les pédales et le volant (mais pas l'écran !)
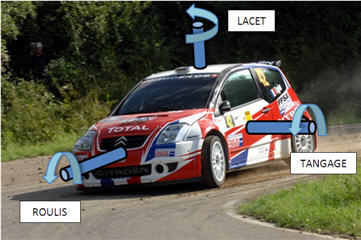
il est animé selon 2 axes (2DOF : Two Degrees of Freedom) : roulis et tangage
Le principe est un "frex-like" car inspiré du modèle commercial Frex
mais en remplaçant les vérins électriques par des motoréducteurs (moteur essuie-glace) + bielle.
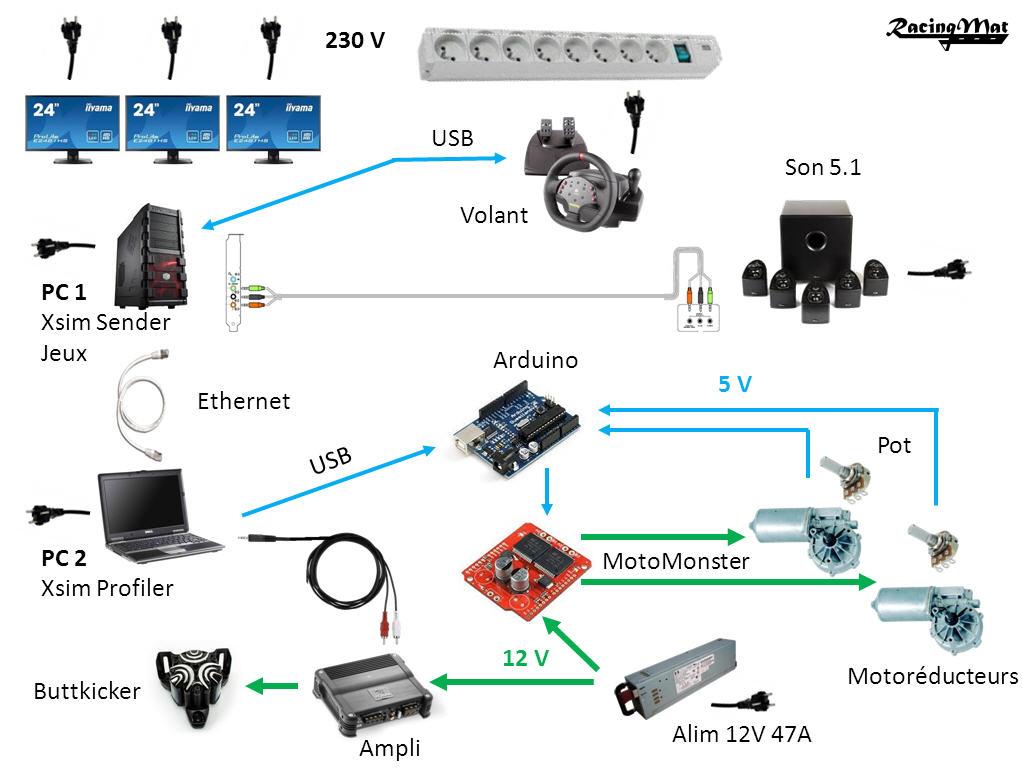
Ce simu utilise le logiciel Xsim2 pour extraire des jeux les données de télémétrie et les envoyer aux moteurs.
- le jeu de voiture (Dirt3, rFactorLite et Richard Burns Rally)
- Xsim Sender
Ce PC fait tourner :
- Xsim Profiler
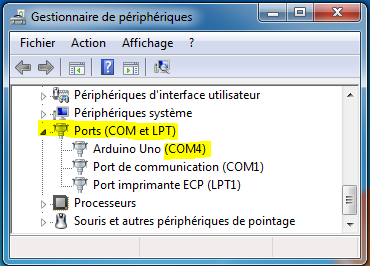
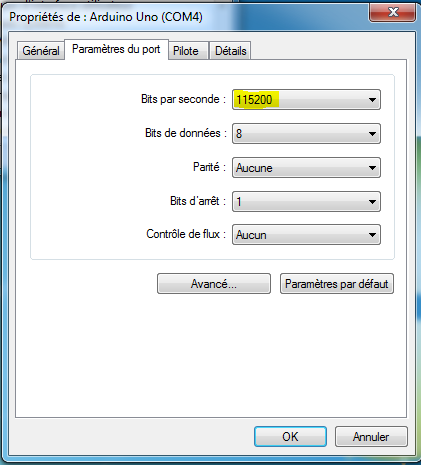
- et pilote la carte Arduino via un câble USB
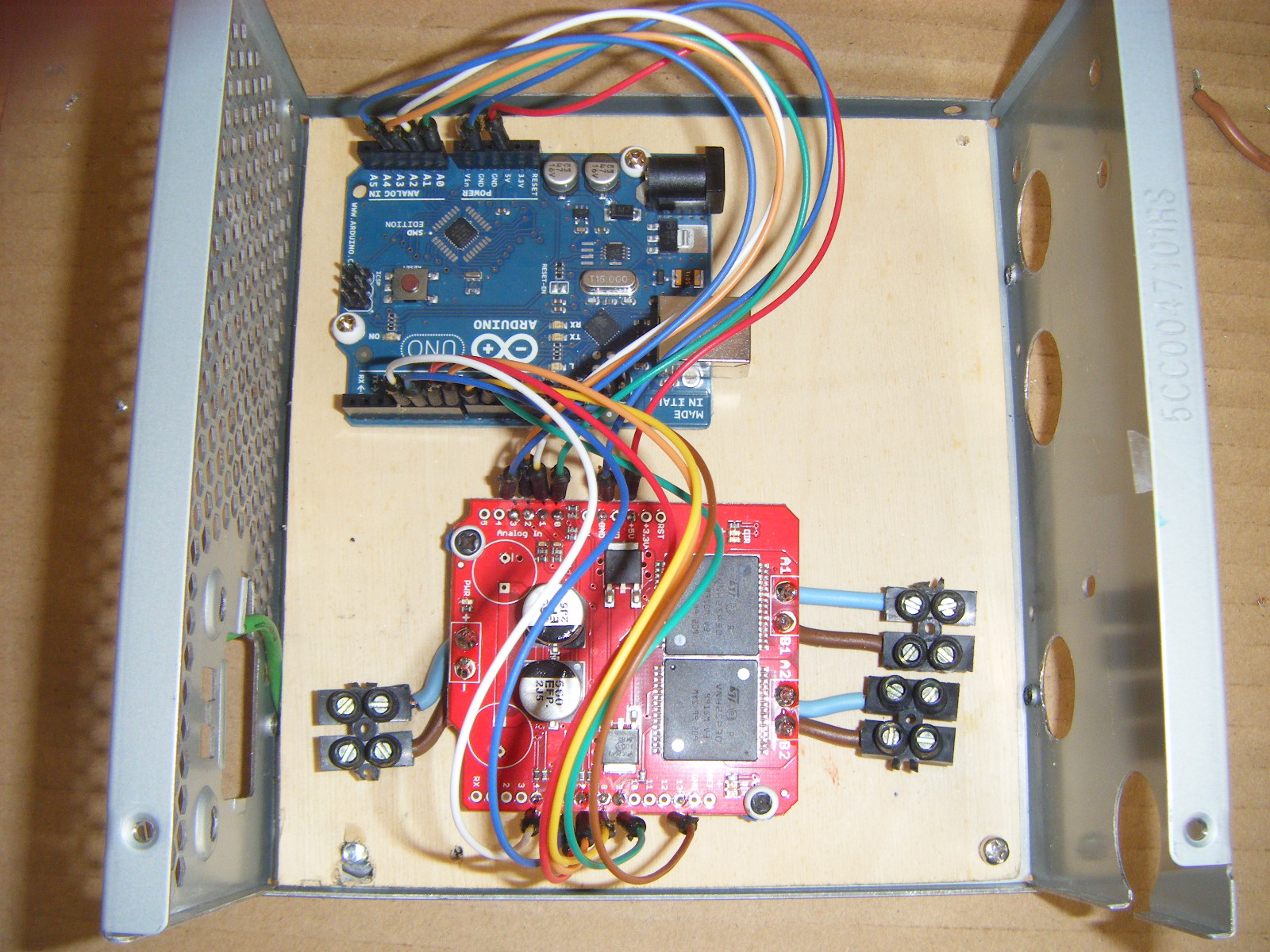
Une carte Arduino couplée à l'ordi n°2 par un câble USB.
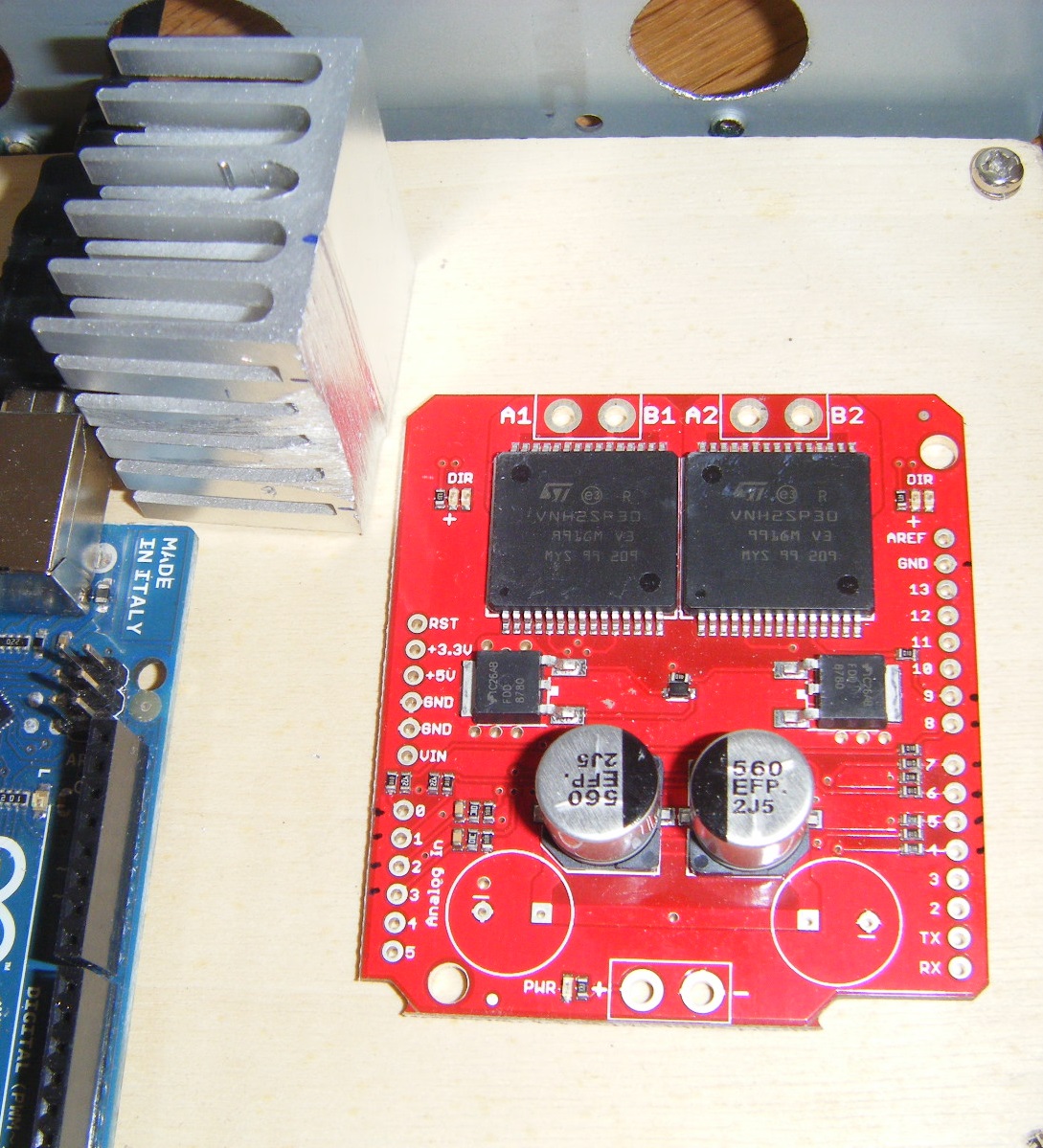
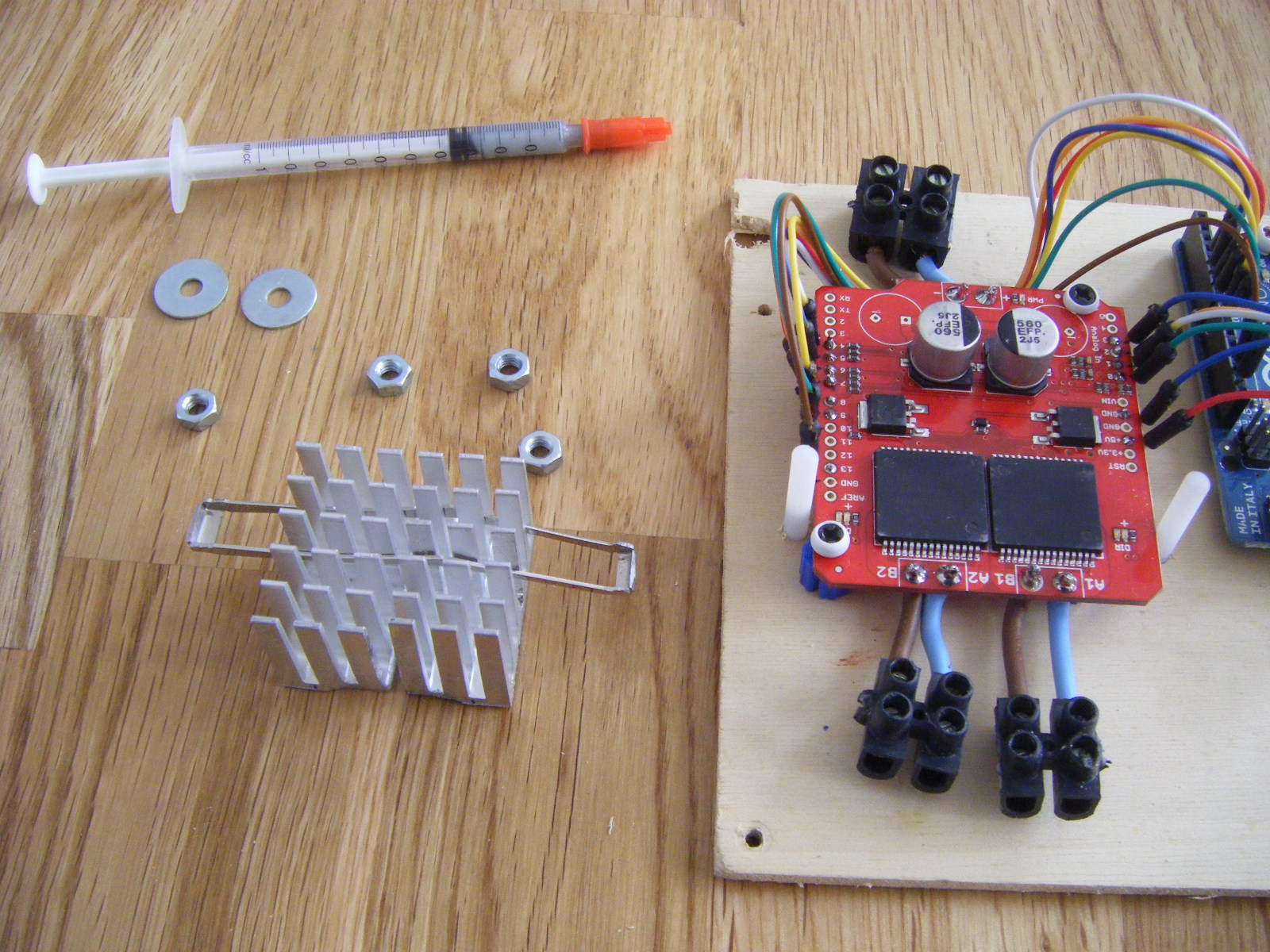
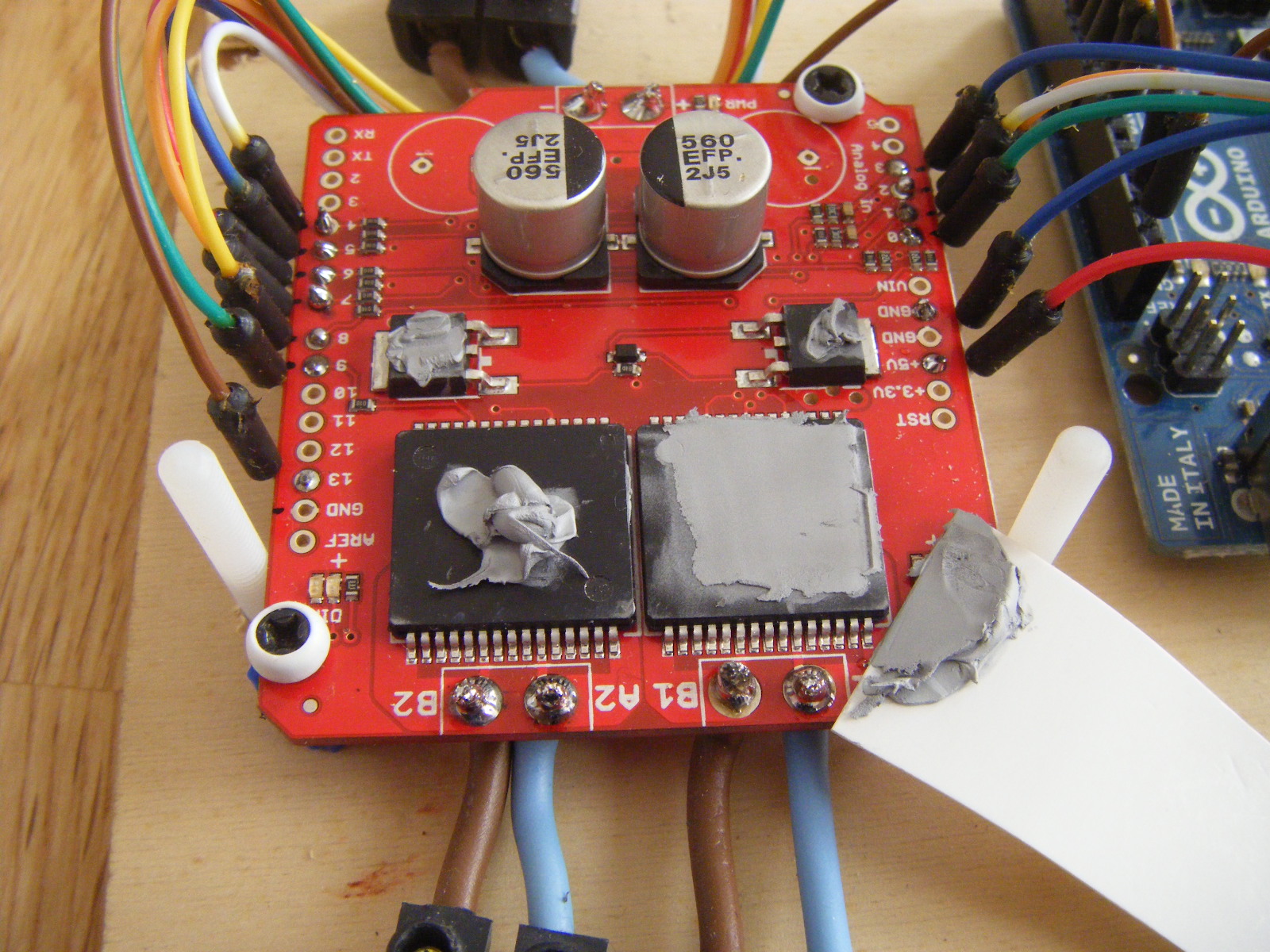
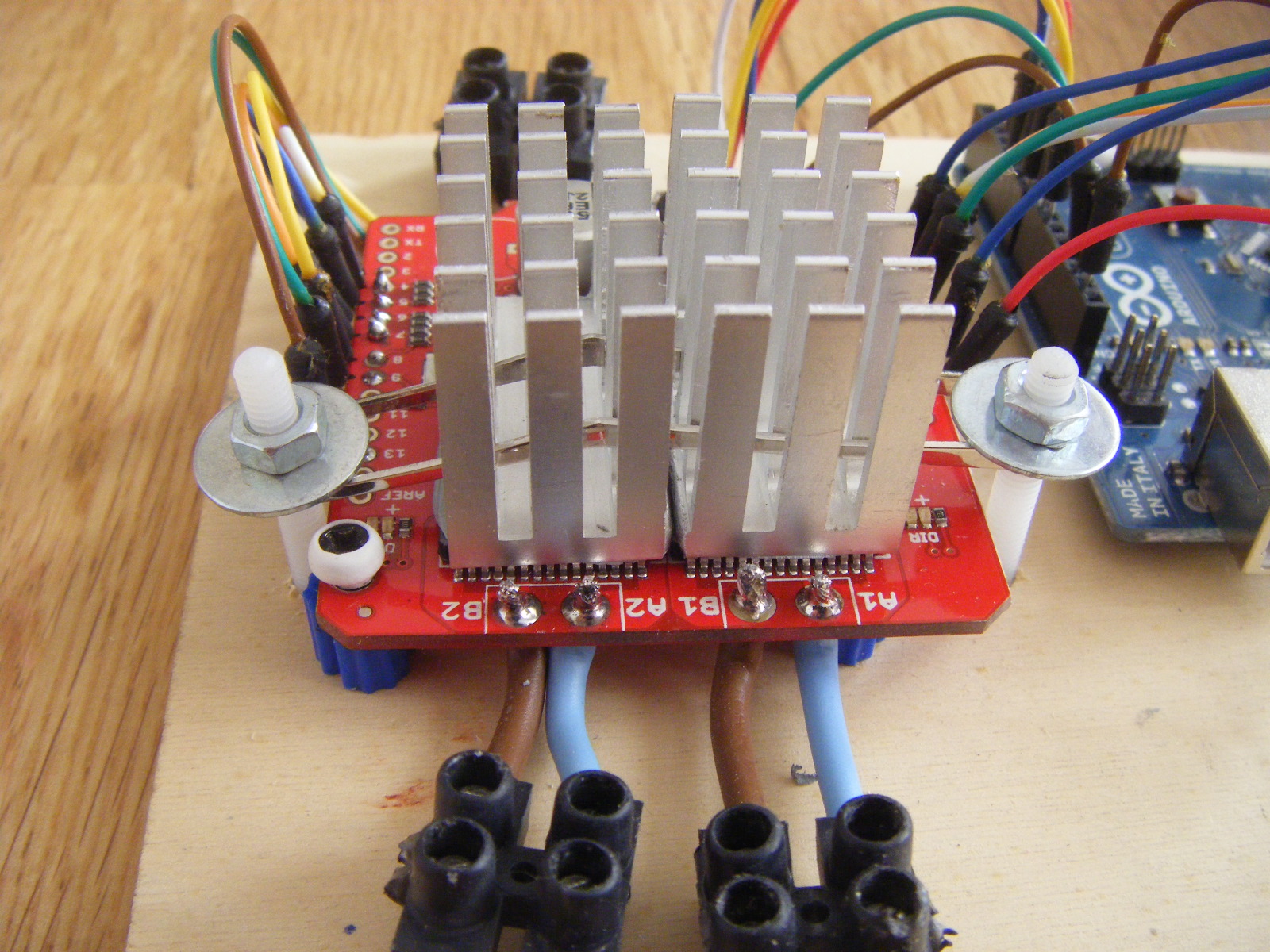
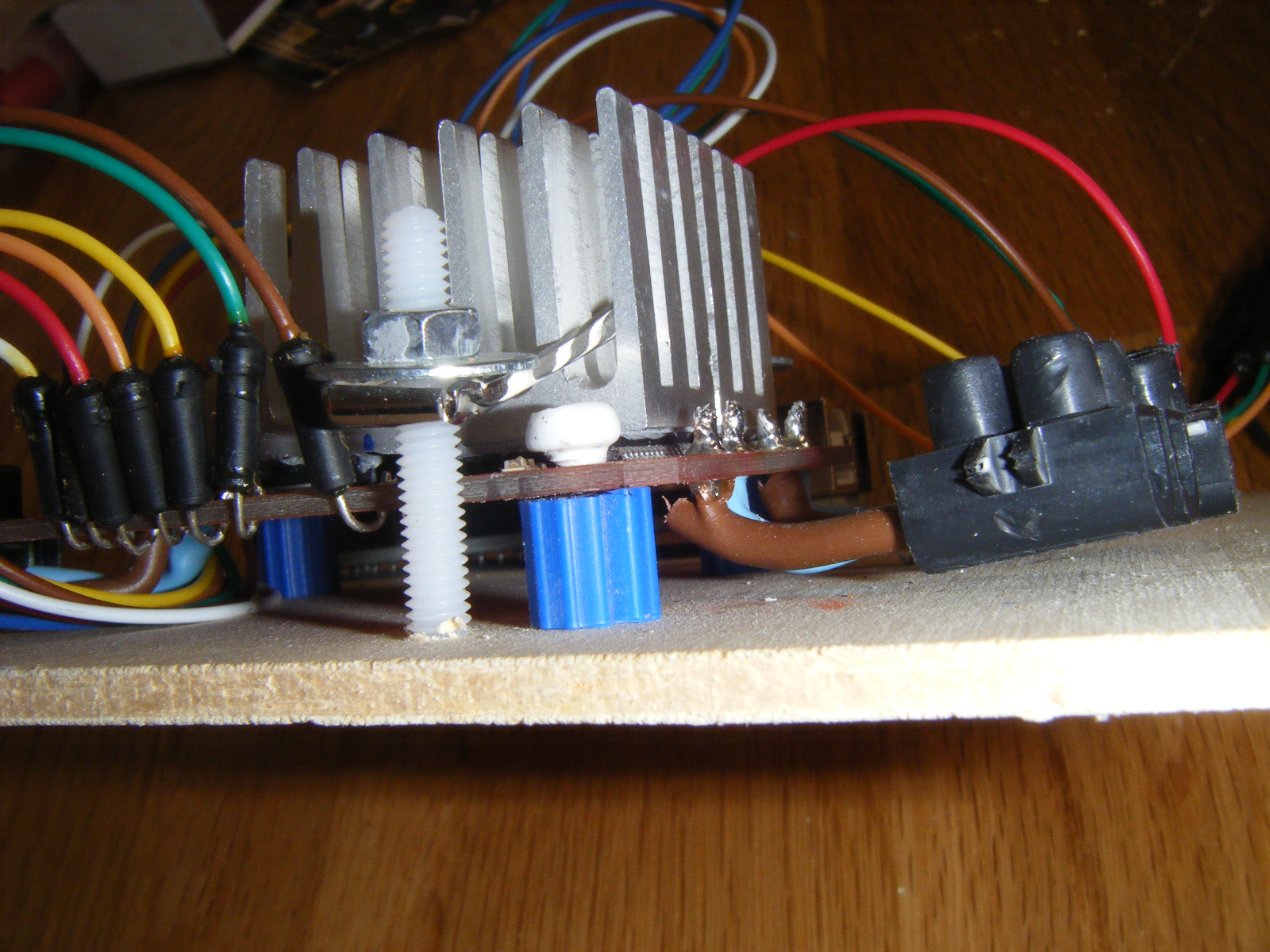
Une
carte de puissance MotoMonster qui pilote les 2 moteurs (12V 47A =
575W) selon les instructions de la carte Arduino (5V 5mA = 25 mW).
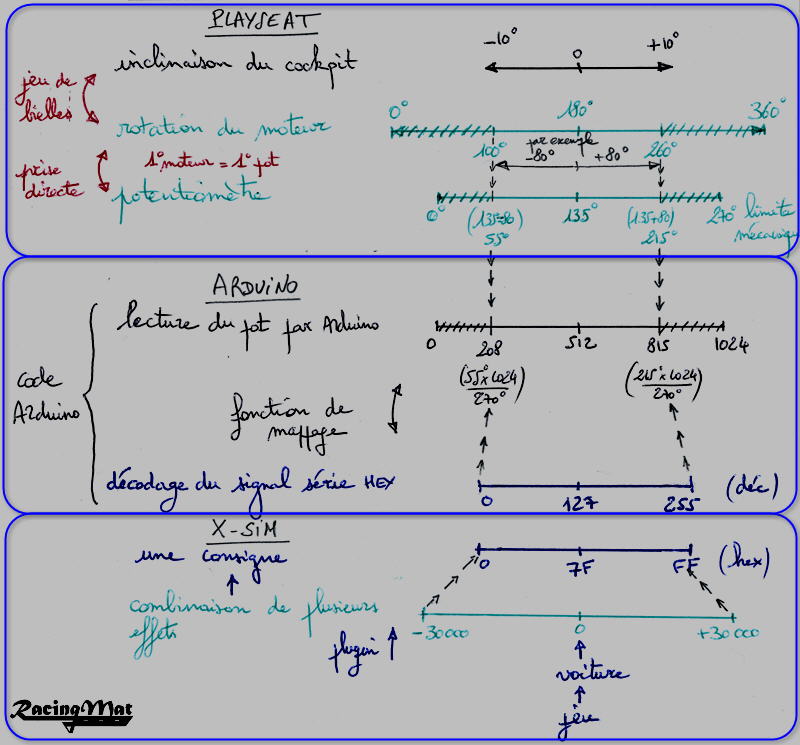
Pour simplifier, c'est l'équivalent de 4 relais : Un programme en C pour paramétrer le fonctionnement de la carte Arduino.
Ce programme interprète les données du port série envoyées par XSim (les consignes).
Il les envoie à la carte de commande moteur.
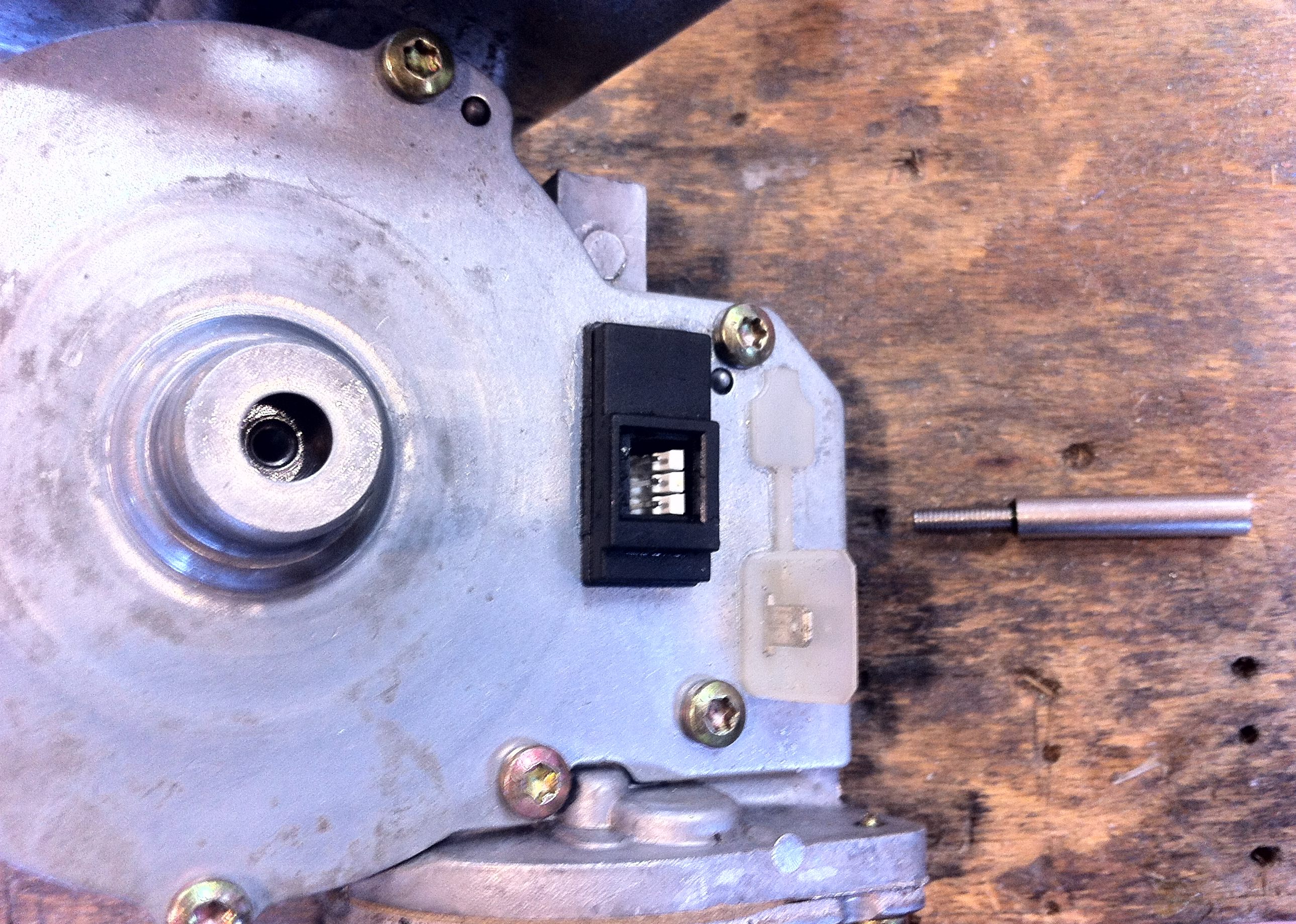
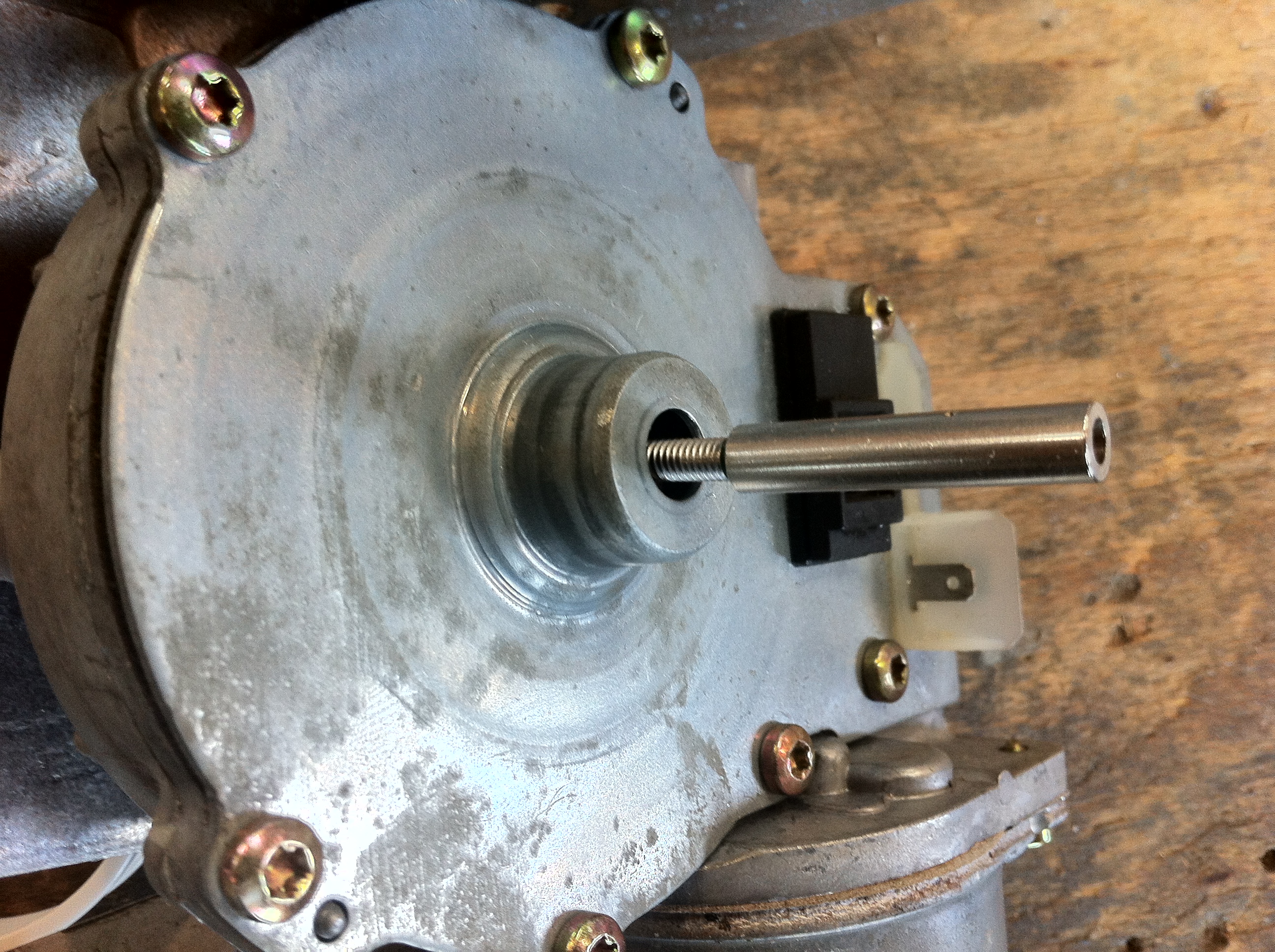
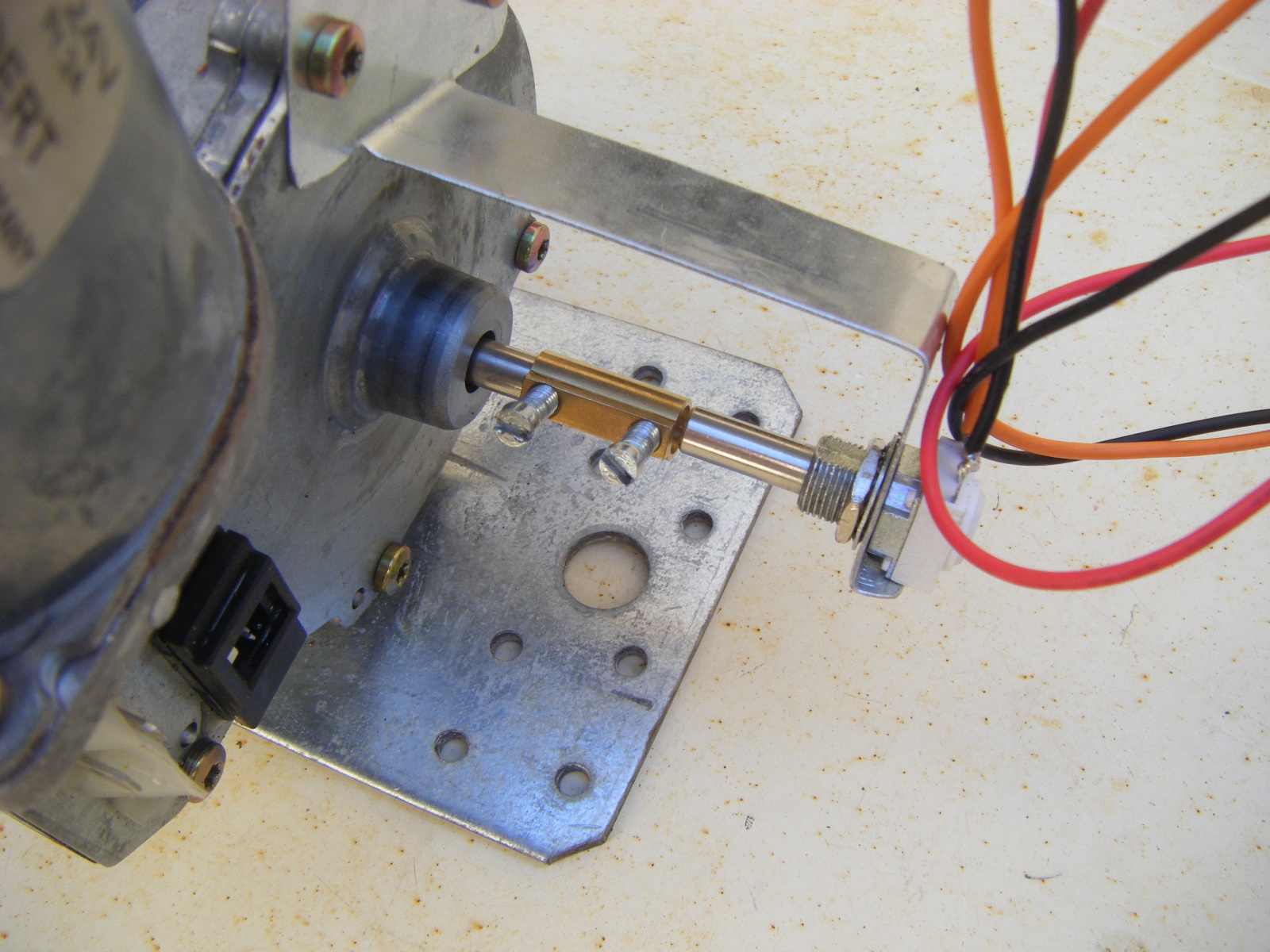
Il effectue un contrôle en rétroaction en lisant les valeurs des potentiomètres couplés aux moteurs :
-> le positionnement réel est comparé à la consigne, cela va créer un nouvel ordre mis à jour envoyé à la carte MotoMonster.
Cette boucle de rétroaction est effectuée xxx fois par secondes (cela restera à mesurer en pratique !)
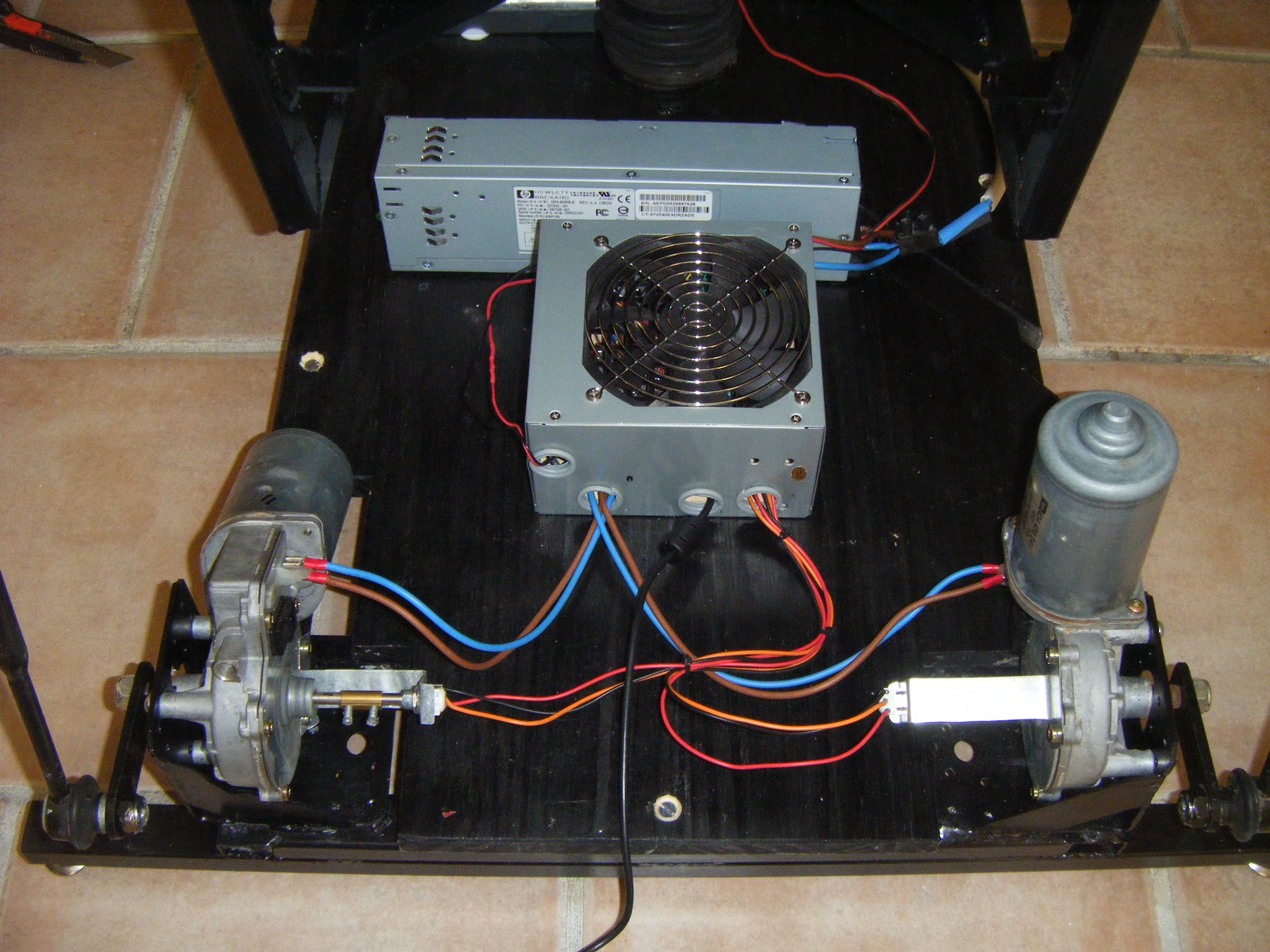
Choisir une alimentation >30A environ.
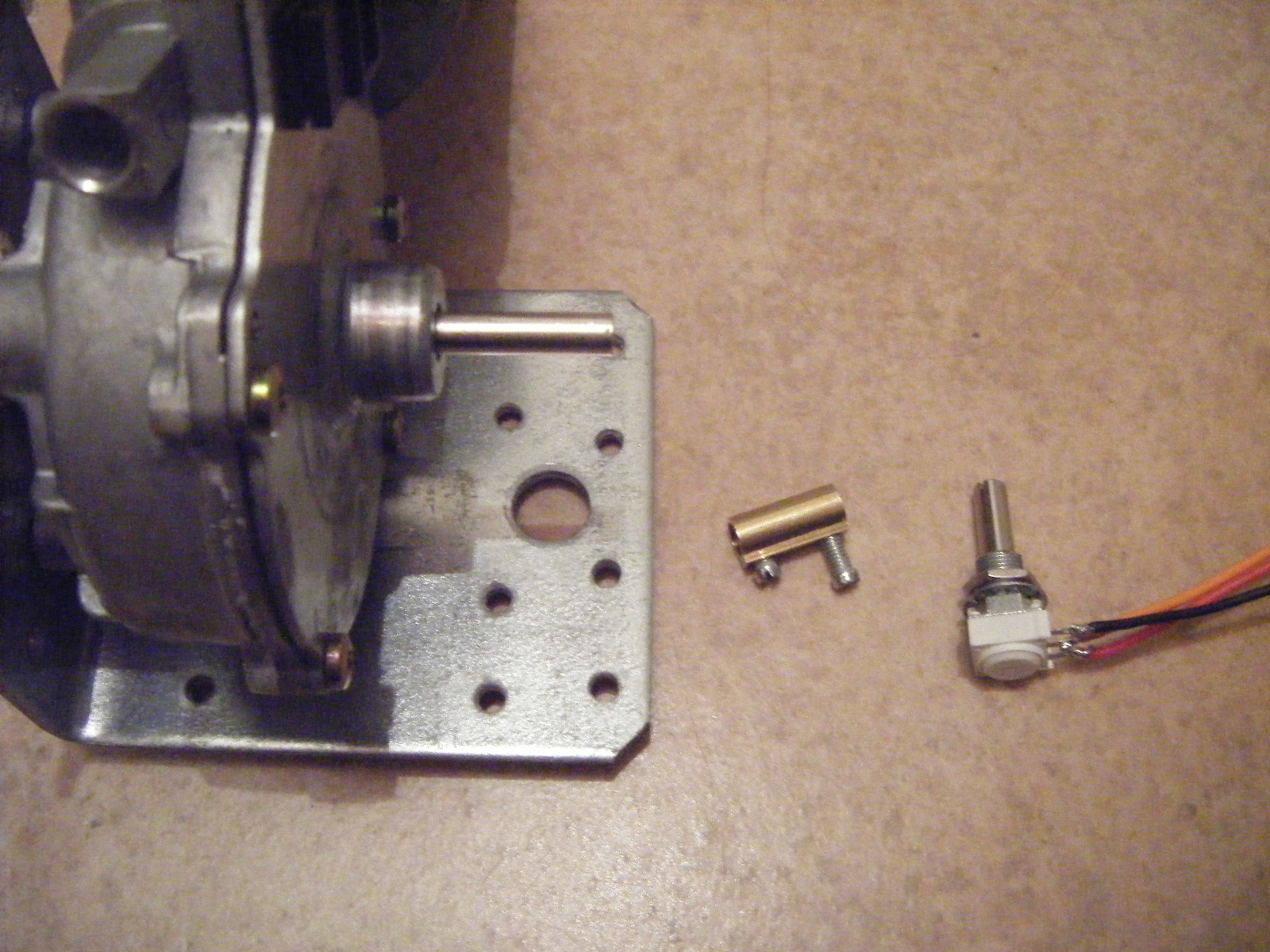
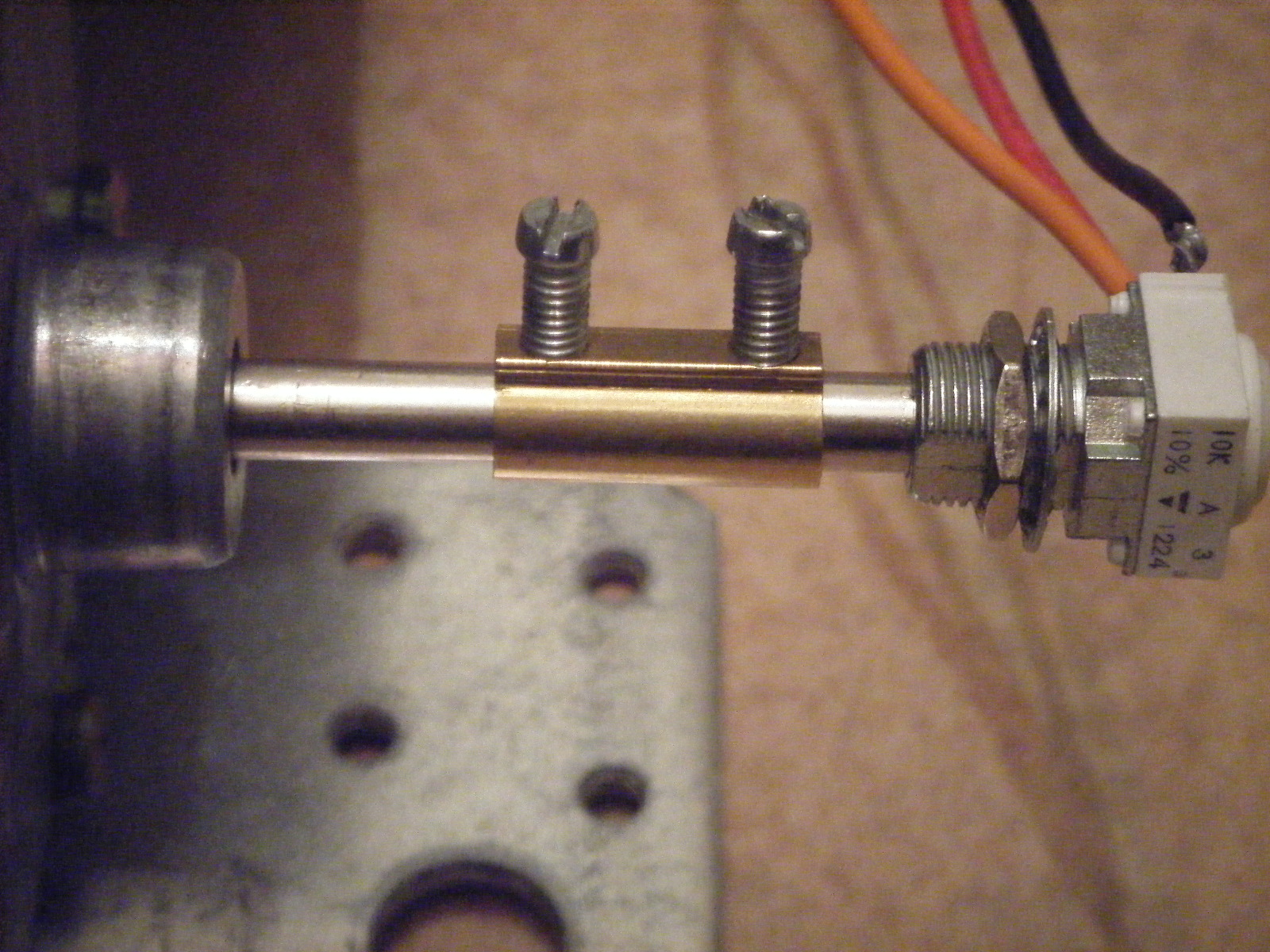
2
moteurs d'essuie-glace pour actionner le plateau mobile, avec leur
potentiomètre de positionnement (pour la rétroaction avec la carte
Arduino).
Une structure en tubes rectangulaires acier : le
chassis repose sur le sol et soutient la partie mobile par
l'intermédiaire d'un cardan automobile.
- un véritable siège
baquet de course (tubulaire). Pour la chasse au poids, il existe des
sièges fibres moins lourds (et plus chers).
- un harnais ! accessoire important pour ressentir au mieux les mouvements du siège et pour le réalisme de l'immersion
- un volant force feedback et ses 2 pédales
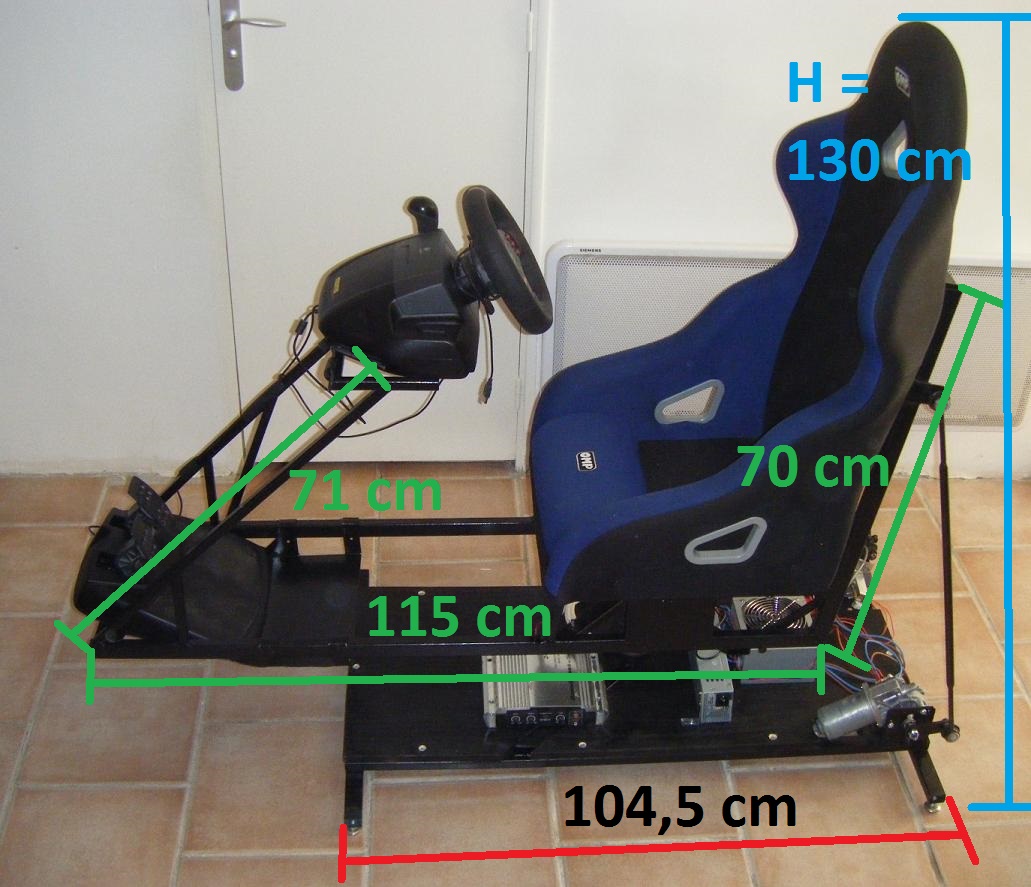
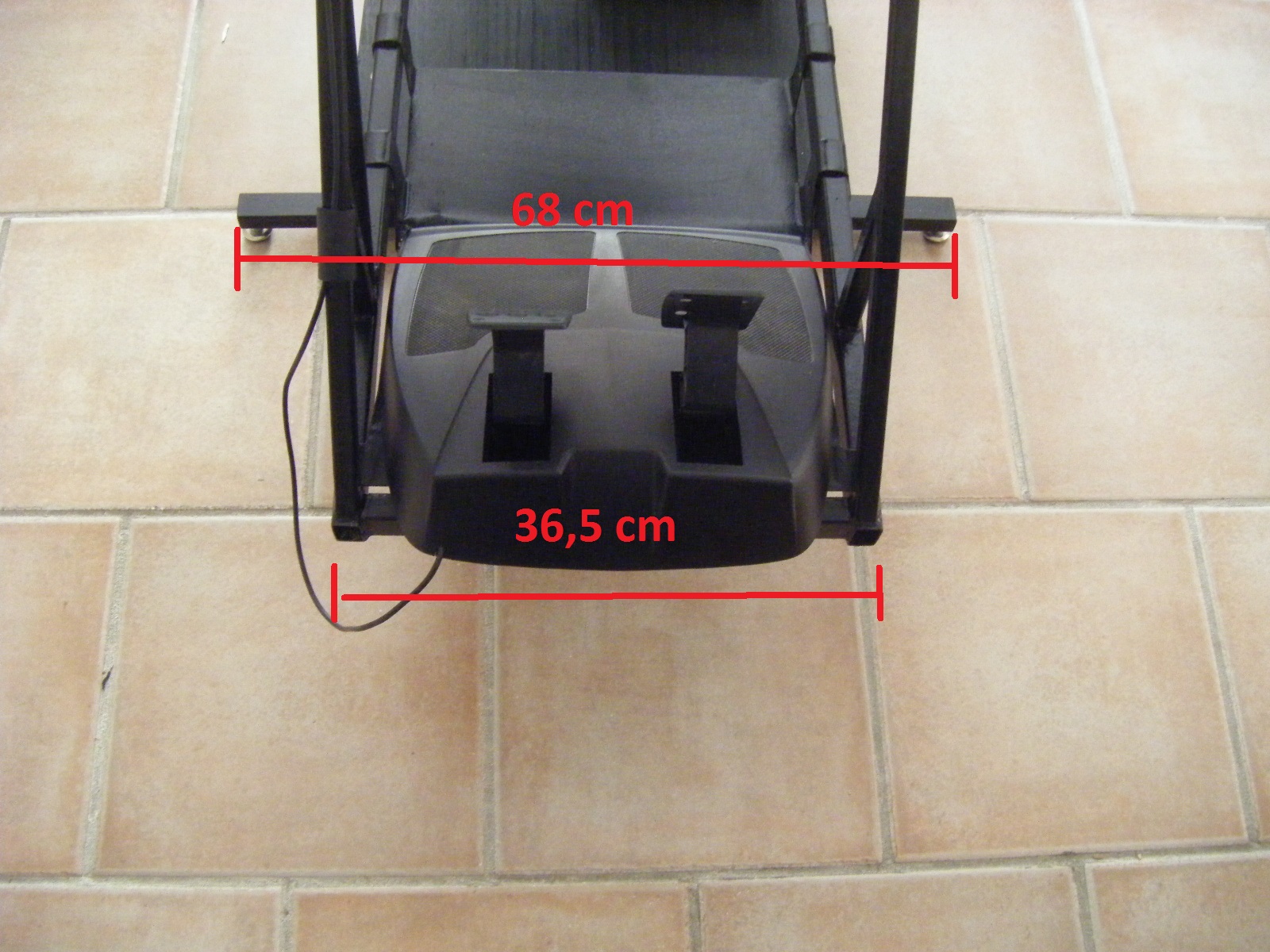
Les dimensions
voici quelques cotes pour vous donner une idée de l'ensemble :
Les étapes en photos :
La structure
Il
a été très pratique d'avoir la plaque de fixation du siège baquet :
j'ai pu contrepercer la structure facilement ! (euh, maintenant elle est
à vendre !!)

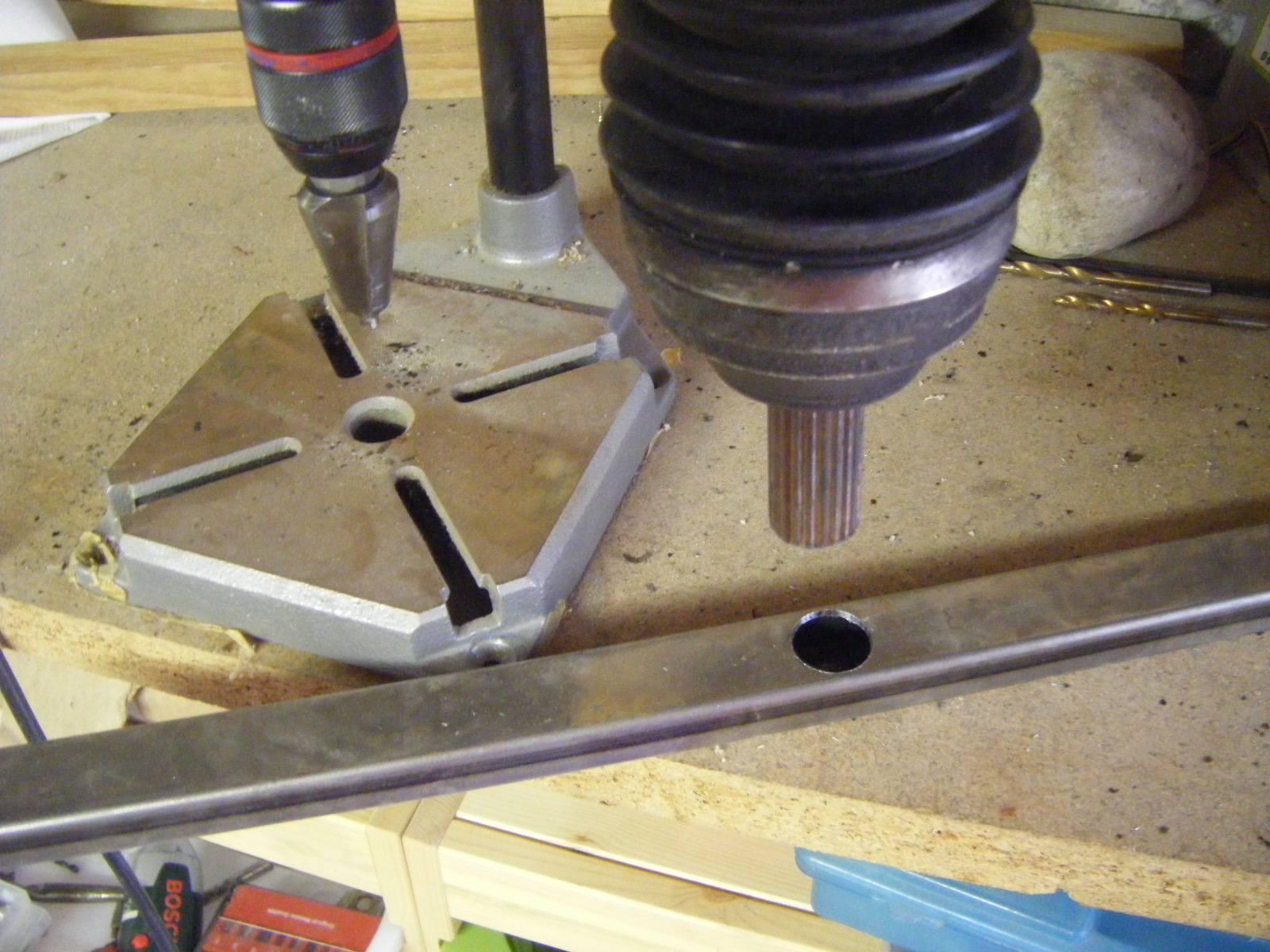
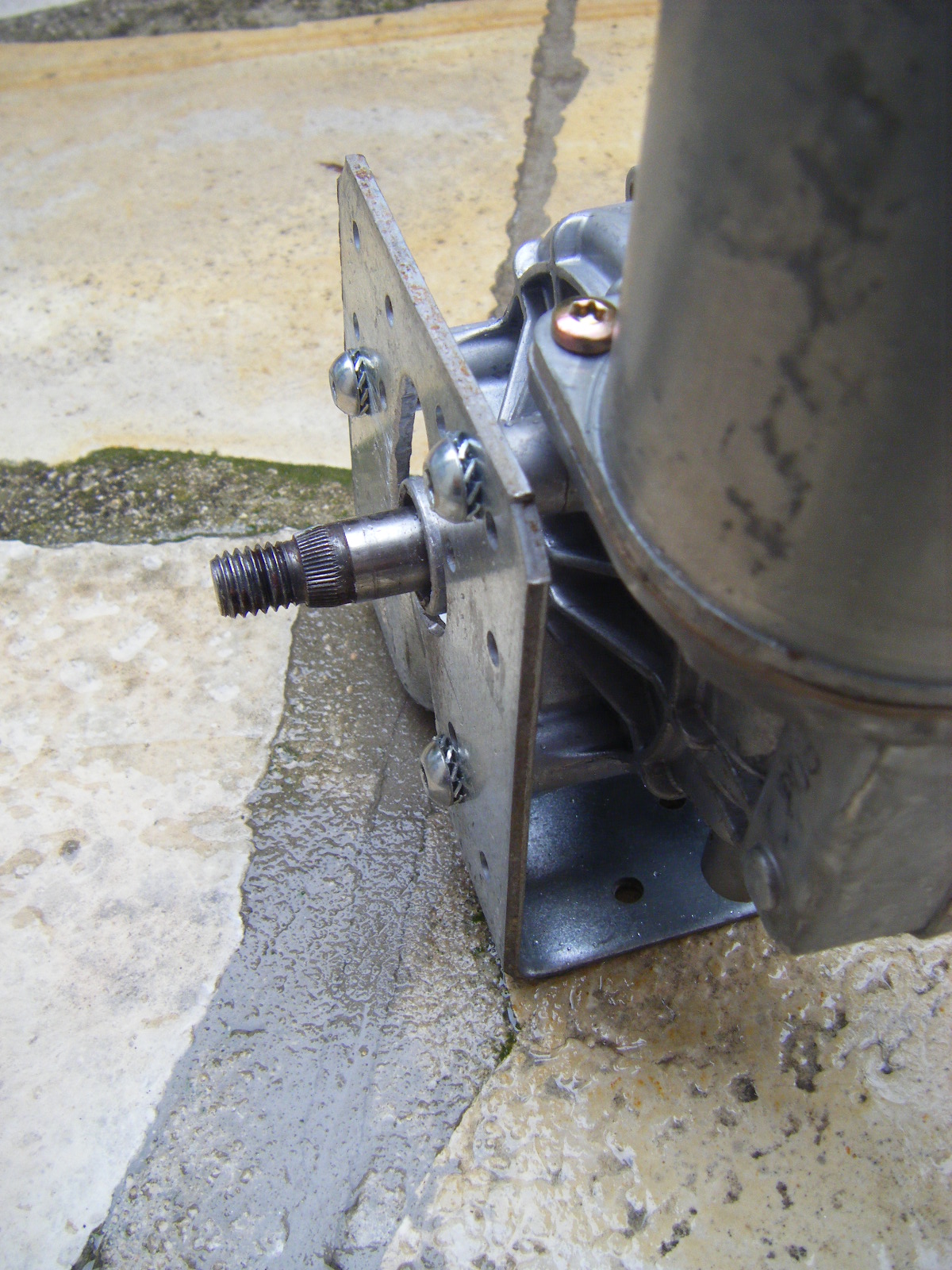
Perceuse à colonne et foret conique pour ajuster le trou de passage au manchon cannelé
et
surtout assurer la perpendicularité du cardan (ce ne sera pas possible
de lrégler lors de la soudure : alors emmanchement légèrement serré)
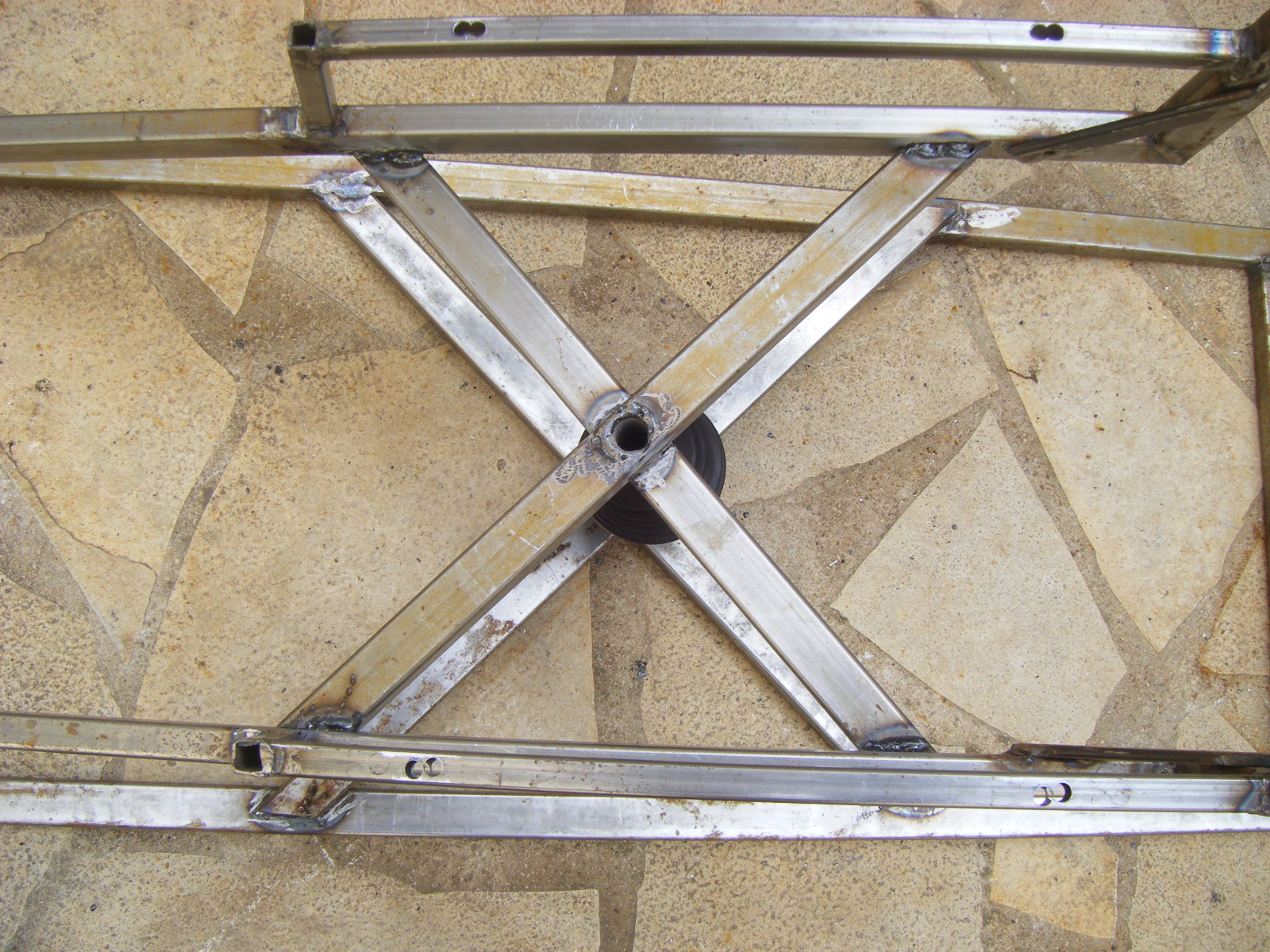
ensuite je croise les barres à 45° pour trianguler mon chassis et reprendre au mieux les efforts :

voilà le châssis :

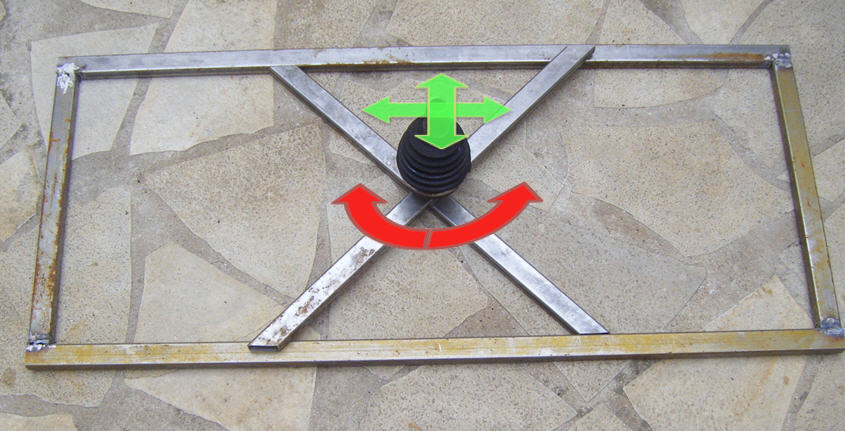
Le cardan de voiture, positionné ainsi, est une rotule mais bloquée en rotation selon l'axe de lacet.
Cela évite les barres d'anti-rotation que l'on peut voir sur les système Frex.
Voici un cardan entier, acheté en rebut à la casse (juste après vérification qu'il n'y avait pas de jeu) : 5€
En
pratique, une fois qu'il est monté, on peut sentir un peu de jeu
lorsque l'on secoue latéralement ... avec le bras de levier de plus d'un
mètre du plateau mobile ! Ca devrait aller.

un cardan assemblé :

ce qui donne ceci ![]()

et ceci


Incontournable : une clef de contact = )
)
hop, une platine sur le côté du support volant :
et voilà une clef "démarreur/arrêt d'urgence" 

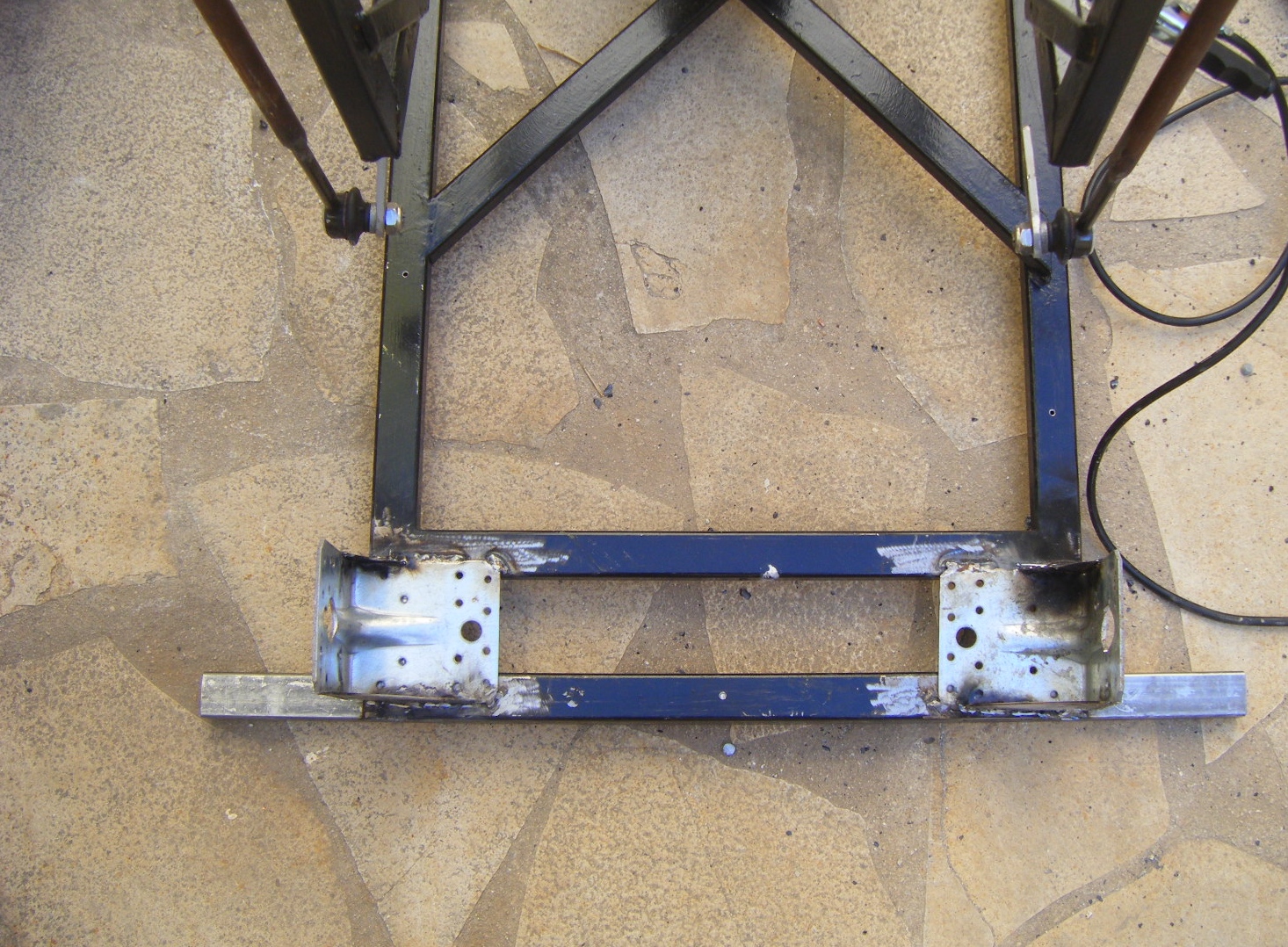
Le support de pédalier
la patte de droite doit être pliée vers le bas !
pliage des pattes à la massette

Le perçage D5mm pour une vis de pression qui va bloquer le support et lui éviter de glisser
Après soudure du rabat, le résultat en perspective :

Mise en place pour contrepercer la base du pédalier et le support en tôle :

Collage à la colle bi-composant de 4 vis M5x16 tête poëlée
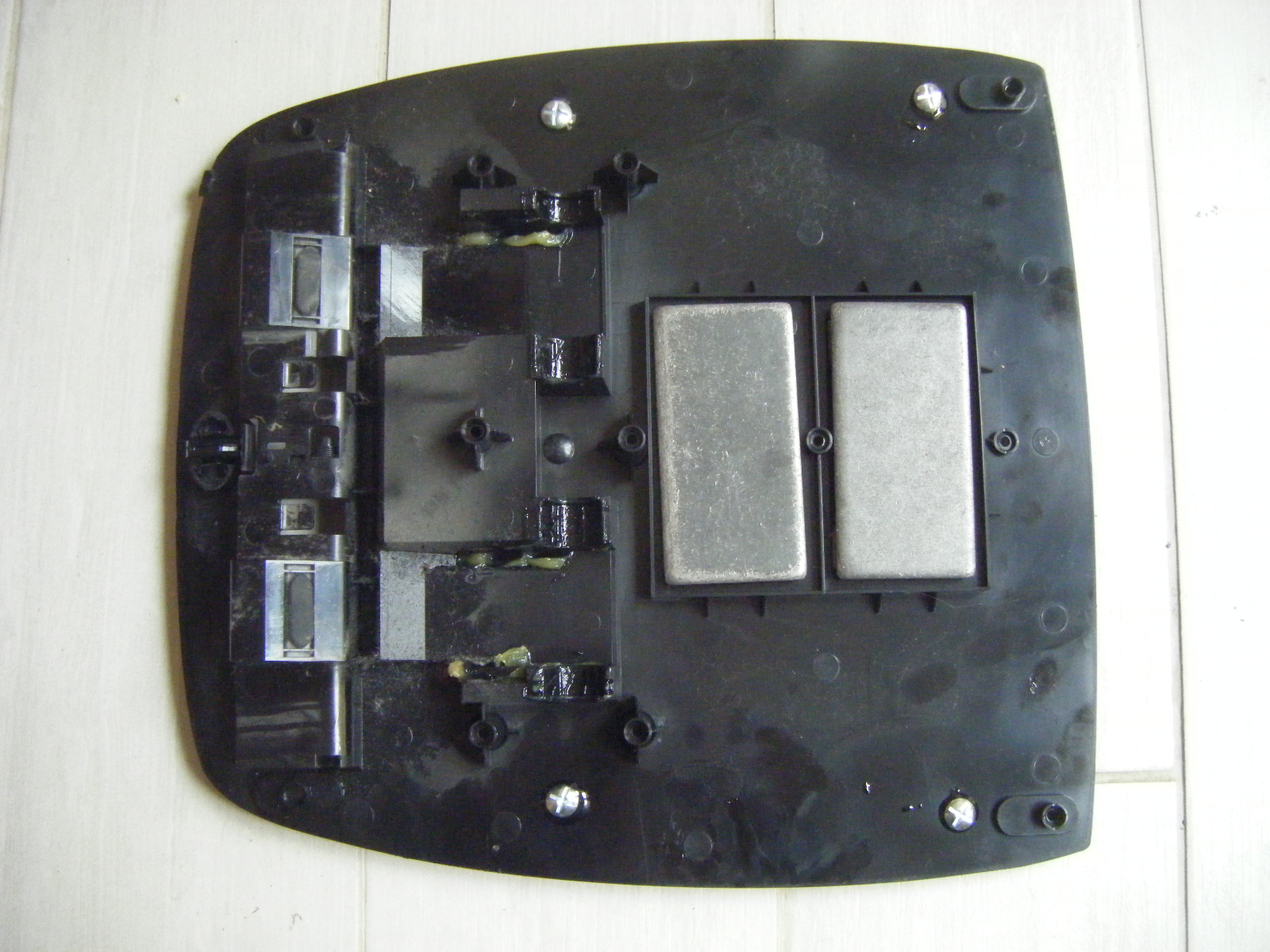
en profiter pour retirer le lest inutile qui rajoute de l'inertie dans le système
après peinture (et raccourcissement des pattes) :

et assemblage par vis papillon : vue en perspective

Le Harnais 4 points
En fait, c'est un 6 points mais ça finit par faire beaucoup d'arnachement

soudure d'un petit boulon

l'attache peut se monter et se retirer

vue de côté :

vue d'ensemble :

conclusion : le harnais c'est chouette !
- pour le look 
- pour l'immersion : on se sent comme dans l'auto de rally !
- pour les sensations : je trouve qu'on lutte moins contre les mouvements du playseat, on est plus solidaire
mais ça réclame un support clavier !!!
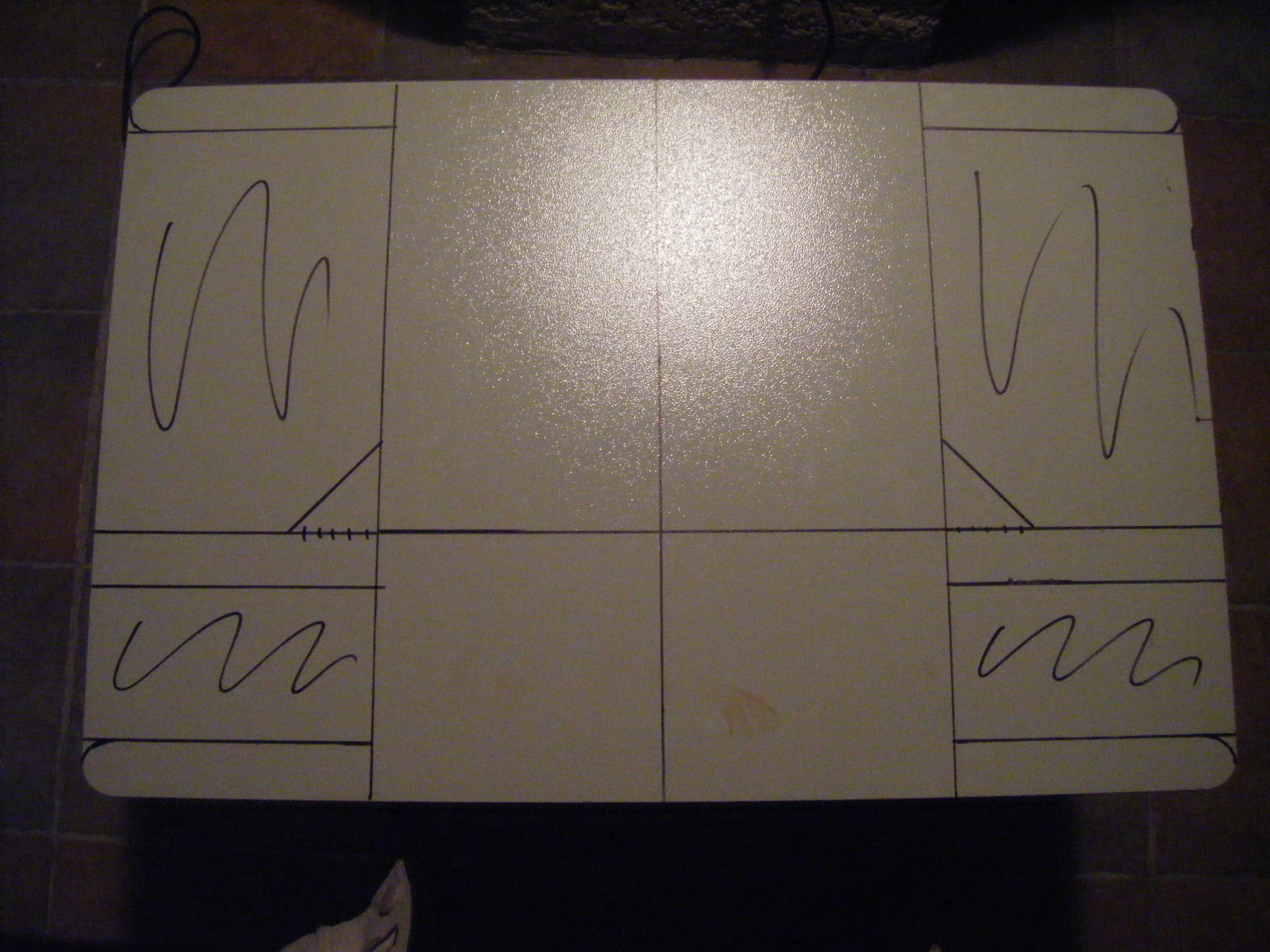
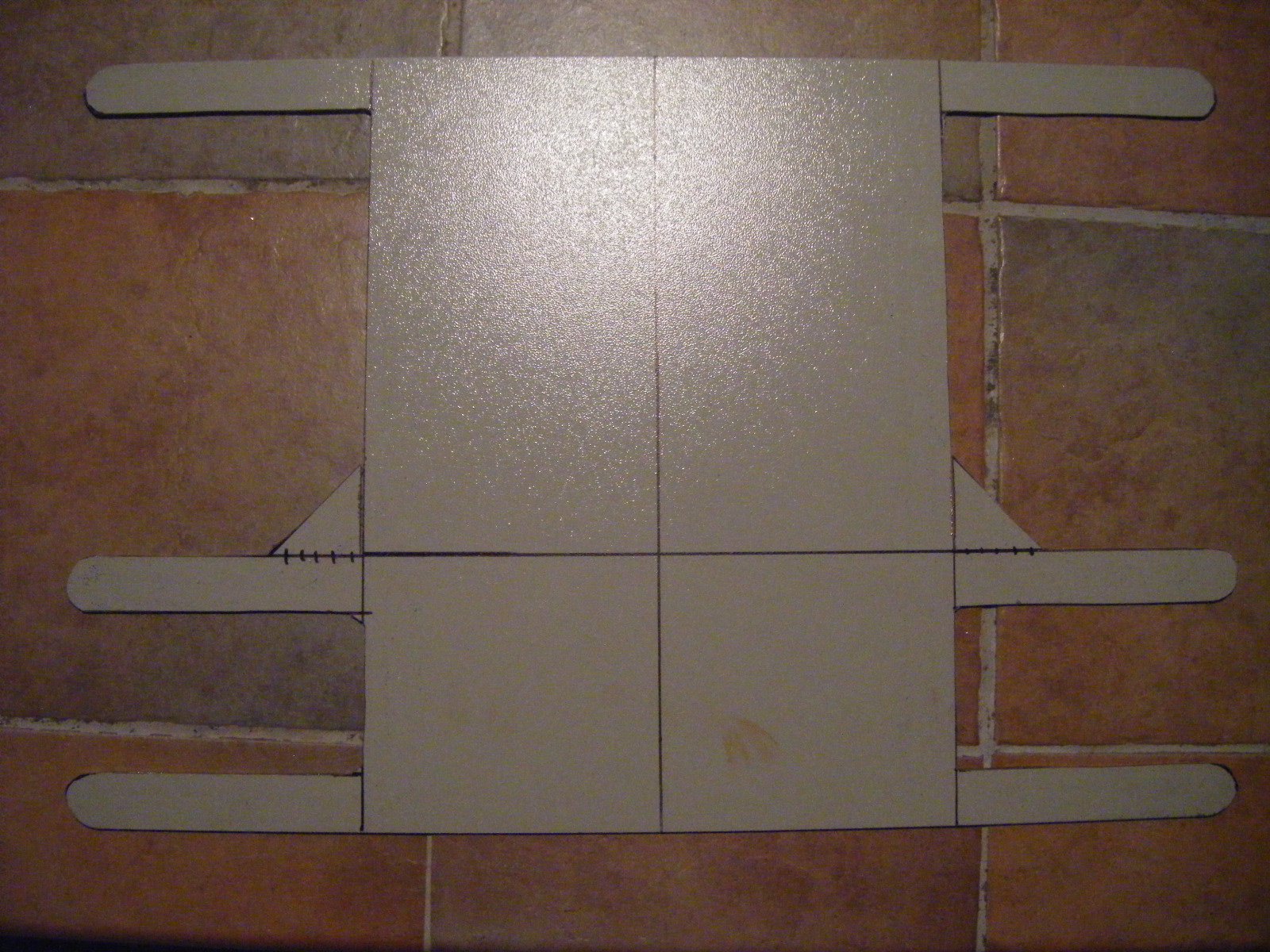
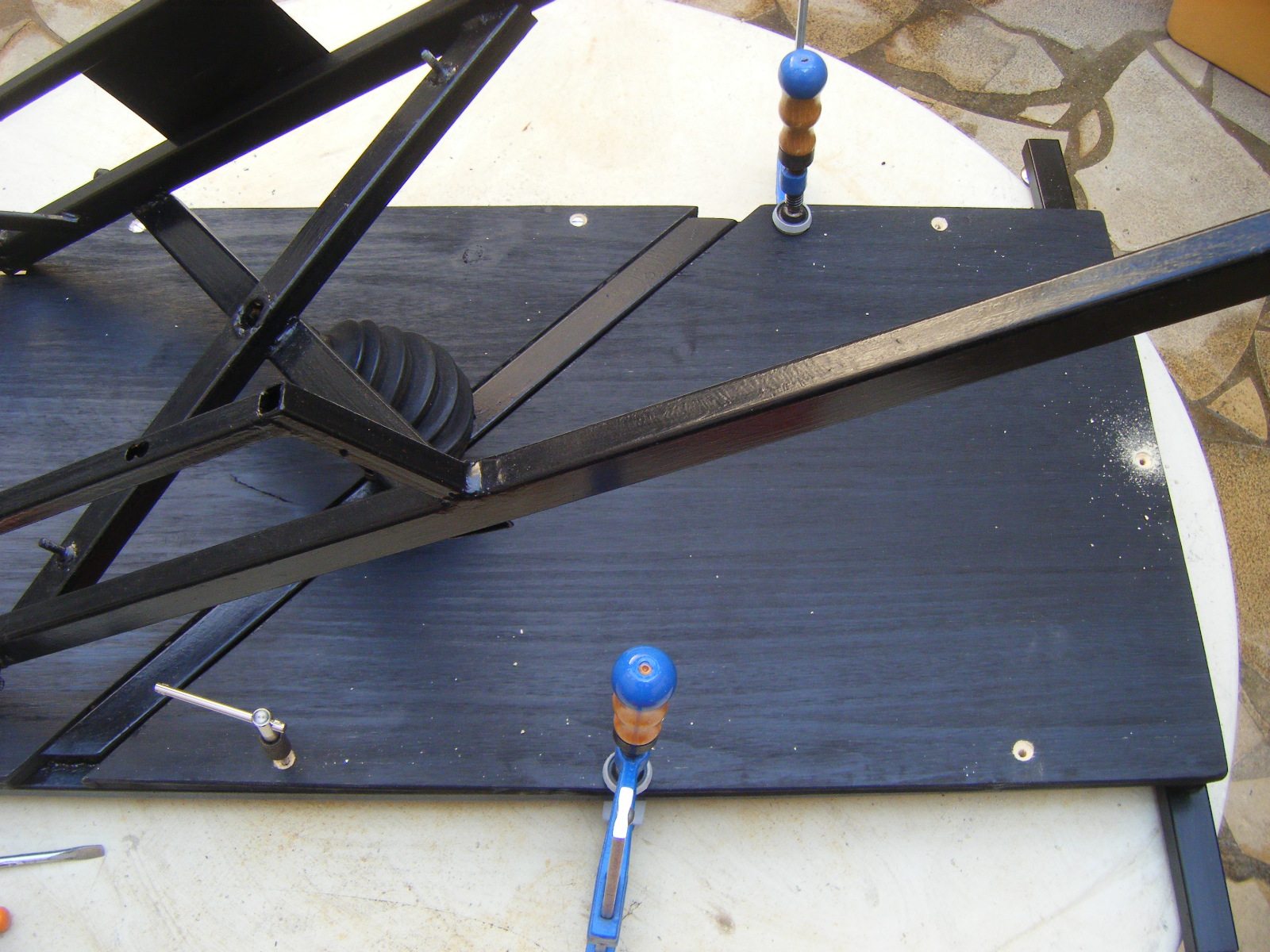
Le fond
Pour finir la structure, une planche en bois découpée "sur mesure"
une autre de l'autre côté
-> voici un fond sur le lequel je vais pouvoir poser mon électronique

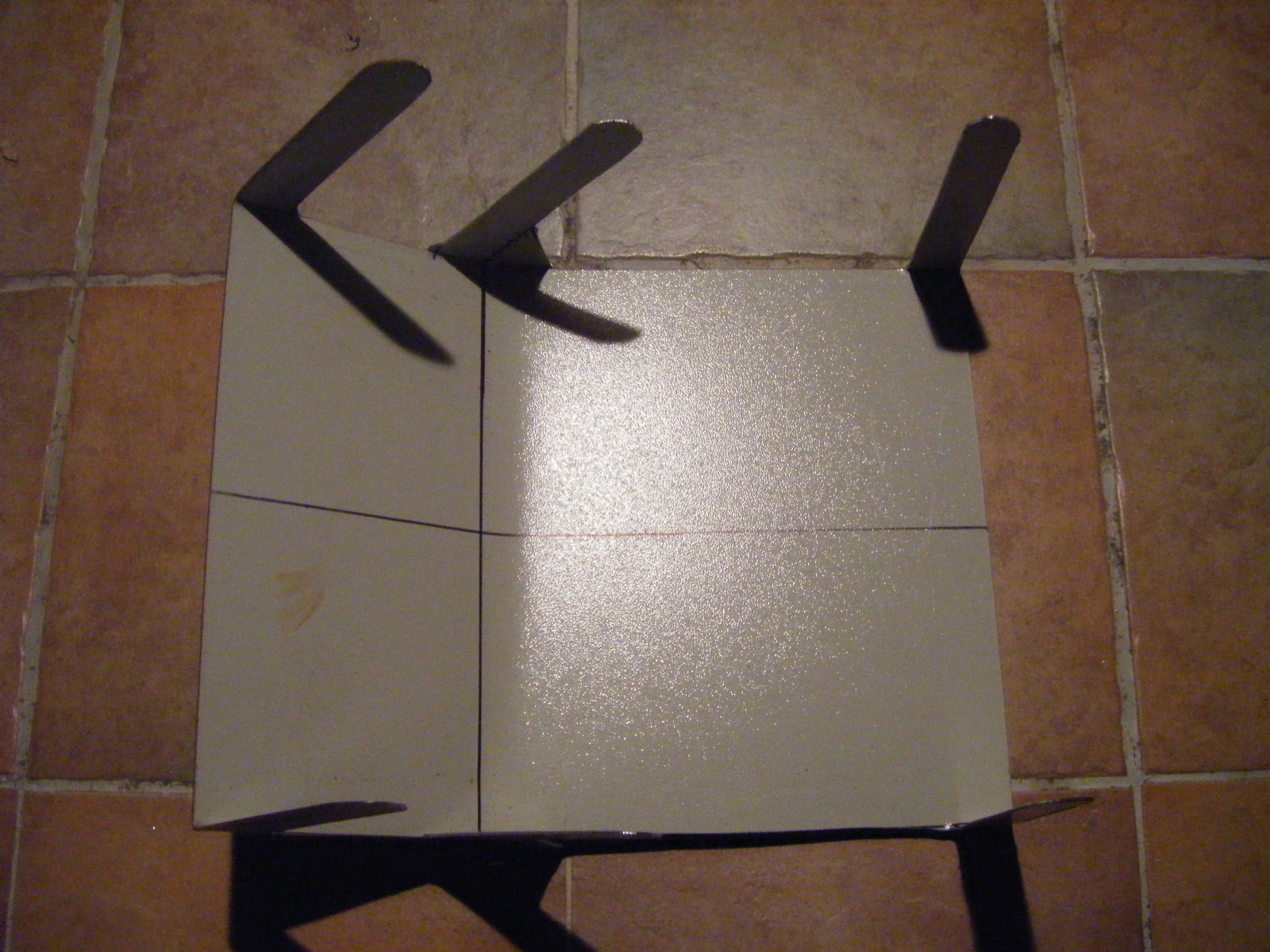
contreperçage diamètre 4, taraudage M5 et vis tête fraisée
Les plots caoutchouc
Accessoire indispensable : les petits plots caoutchouc pour amortir les vibrations sur le sol et assurer la stabilité.
J'en ai mis un au 4 coins et un presque sous l'axe du cardan pour reprendre le maximum des efforts du poids.
voici des pieds en plastique dur et réglables (2,79€ les 4 chez Bricoman + 4 écrous bas M10)
ce modèle devrait avoir tout bon

après un taraudage M10 du châssis et avec un écrou bas pour faire le blocage.

Largeur du
chassis, j'avais visé une taille compacte au départ en me disant que je
pourrai toujours élargir facilement s'il faut plus de stabilité.
Edit : Les premiers tests ont montrés que ... ce n'était pas assez large !!
alors : + 11 cm de chaque côté (ça doit repasser par la porte ^-) pour un total de 68 cm
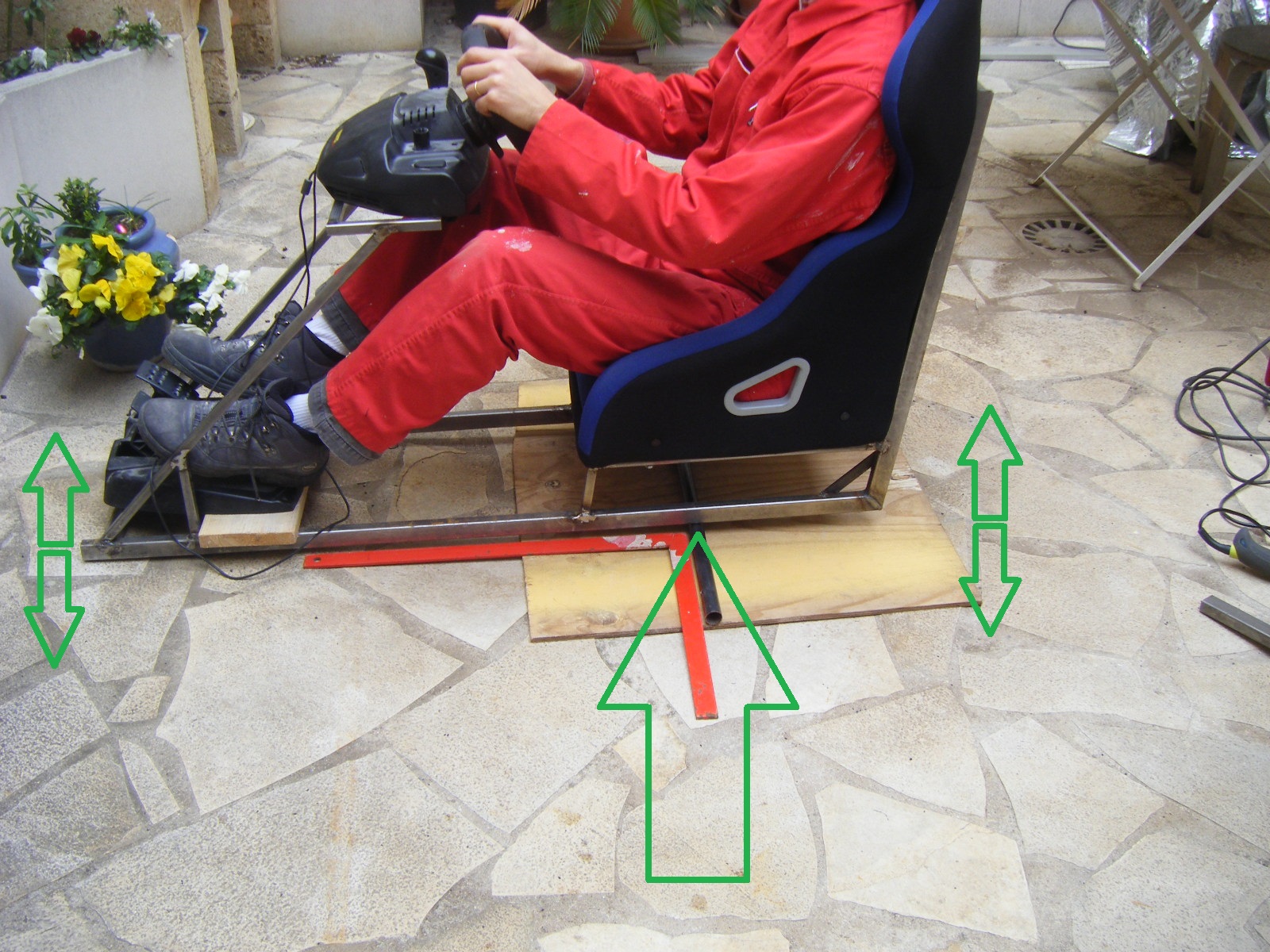
Le Centre de Gravité cdg
je l'ai déterminé avec "précision" avec mon assistant :
sur un tube acier, faire rouler le châssis pour trouver l'équilibre
(bien positionner le tube perpendiculairement : équerre rouge)
Avec le pilote dedans !
La mécanique :
Dans un système Frex, le siège est actionné par des vérins électriques.
Le modèle recommandé par les utilisateurs de Xsim sont les SCN5 et l'appli a une fenêtre dédiée de paramétrage.
Mais il faut compter 320€ pièce (un seul revendeur mondial ici)
Ici,
les vérins sont avantageusement remplacés par des moteurs
d'essuie-glace et un système de bielles (c'est juste 10x moins cher !).
((
Comme
je souhaite embarquer le pilote mais aussi le volant et les pédales, je
n'utiliserai pas des moteurs essuie-glace de voiture et je partirai
(finalement) sur les moteur d'essuie-glace de camion de marque Smolka
qui sont conseillés par Lipide512
^-
Pour animer seulement le siège, les moteurs de Golf3 fonctionnent bien : voir en bas dans les liens, le site de Stephaned61.
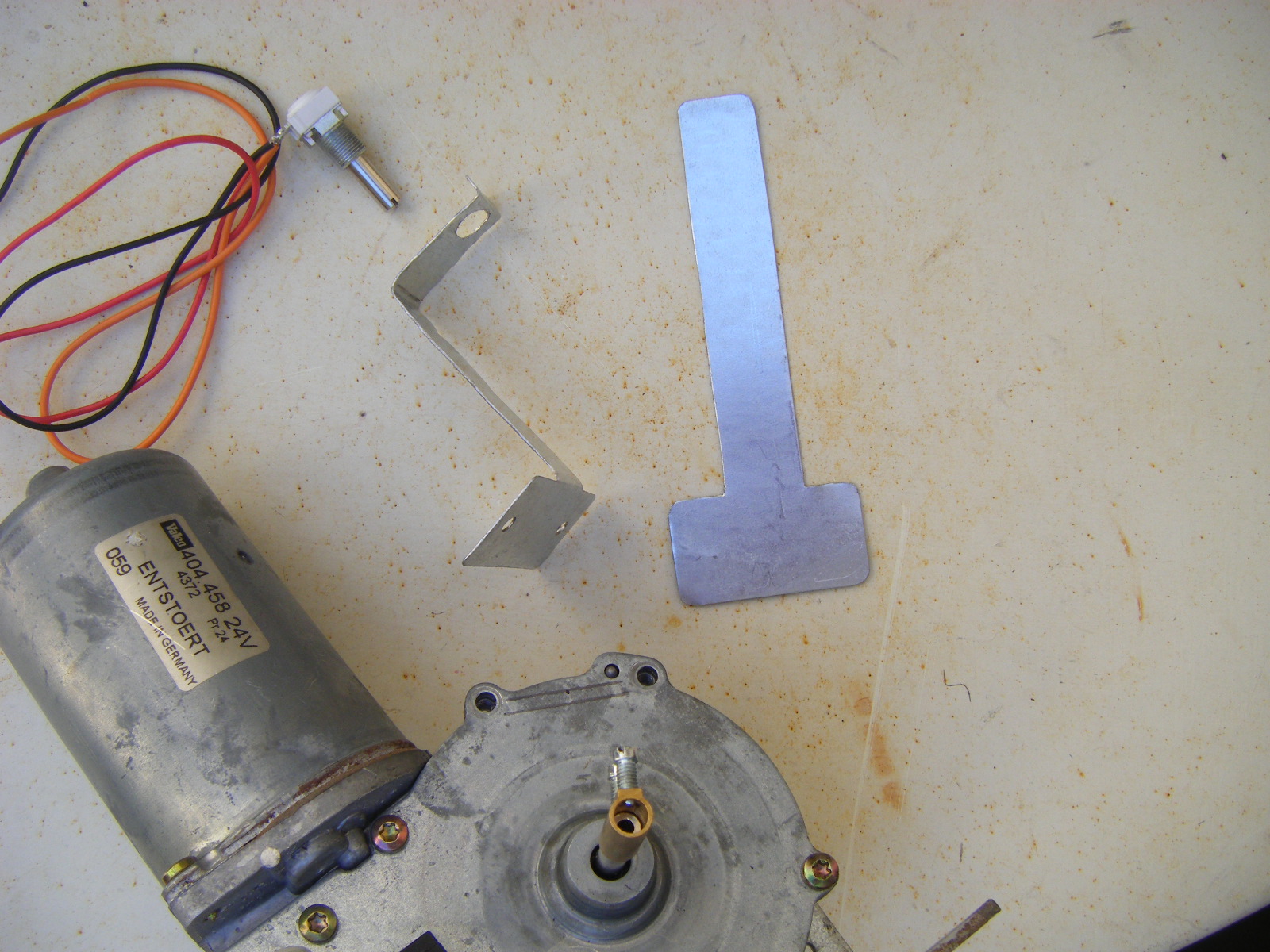
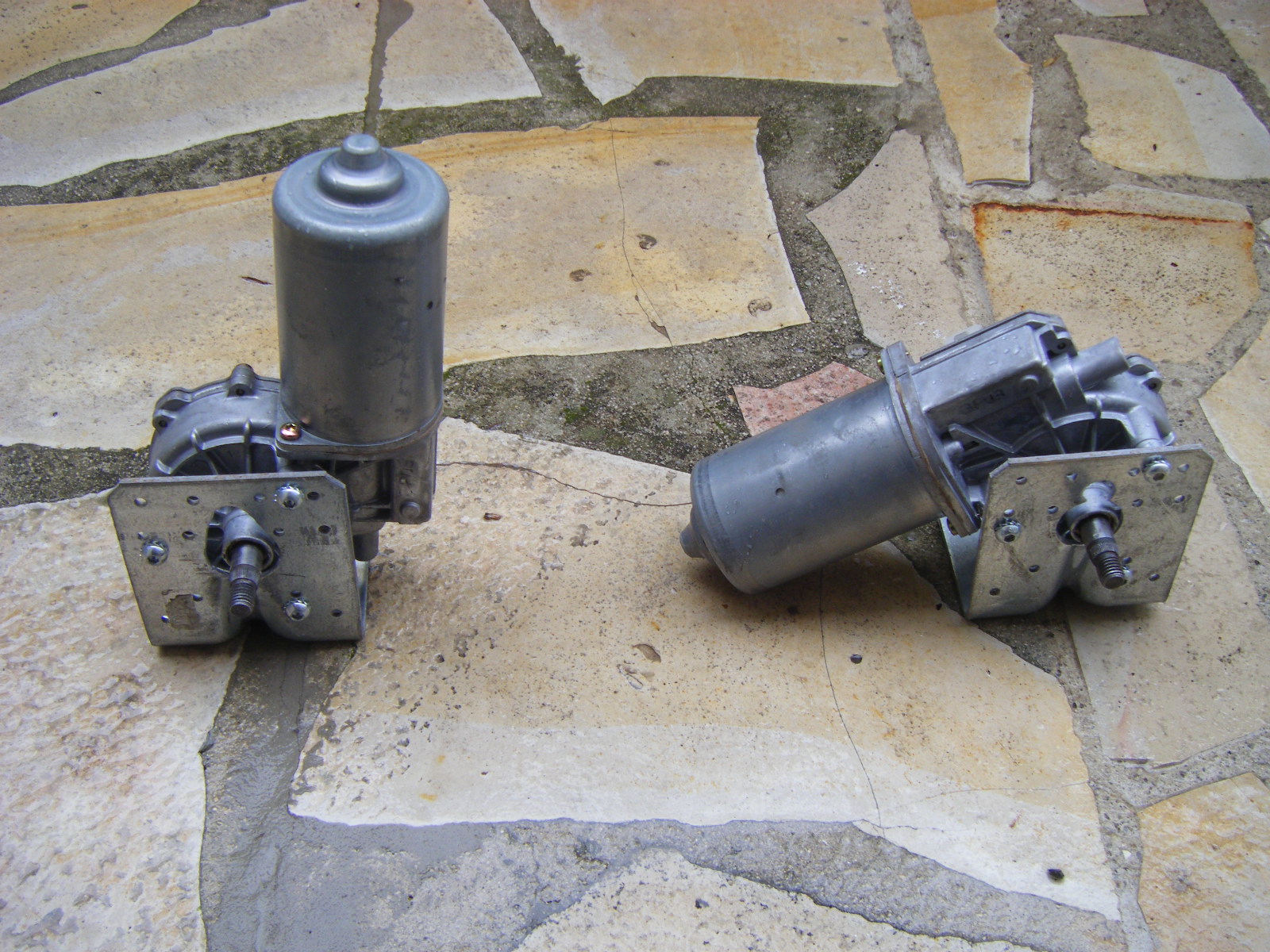
Moteurs essuie-glace
Mécaniquement,
le meilleur serait le principe du protoV1 de Lipide512 + un palier en
bronze à l'autre extrémité (pour éviter le porte-à-faux sur l'axe du
moteur).
Je vais rester simple et pragmatique : pour ce playseat, il y aura du porte à faux !
Bon, j'ai acheté les Smolka pour assurer le coup ! et ne pas trembler à chaque fois qu'un ami costaud :'( souhaitera essayer !!
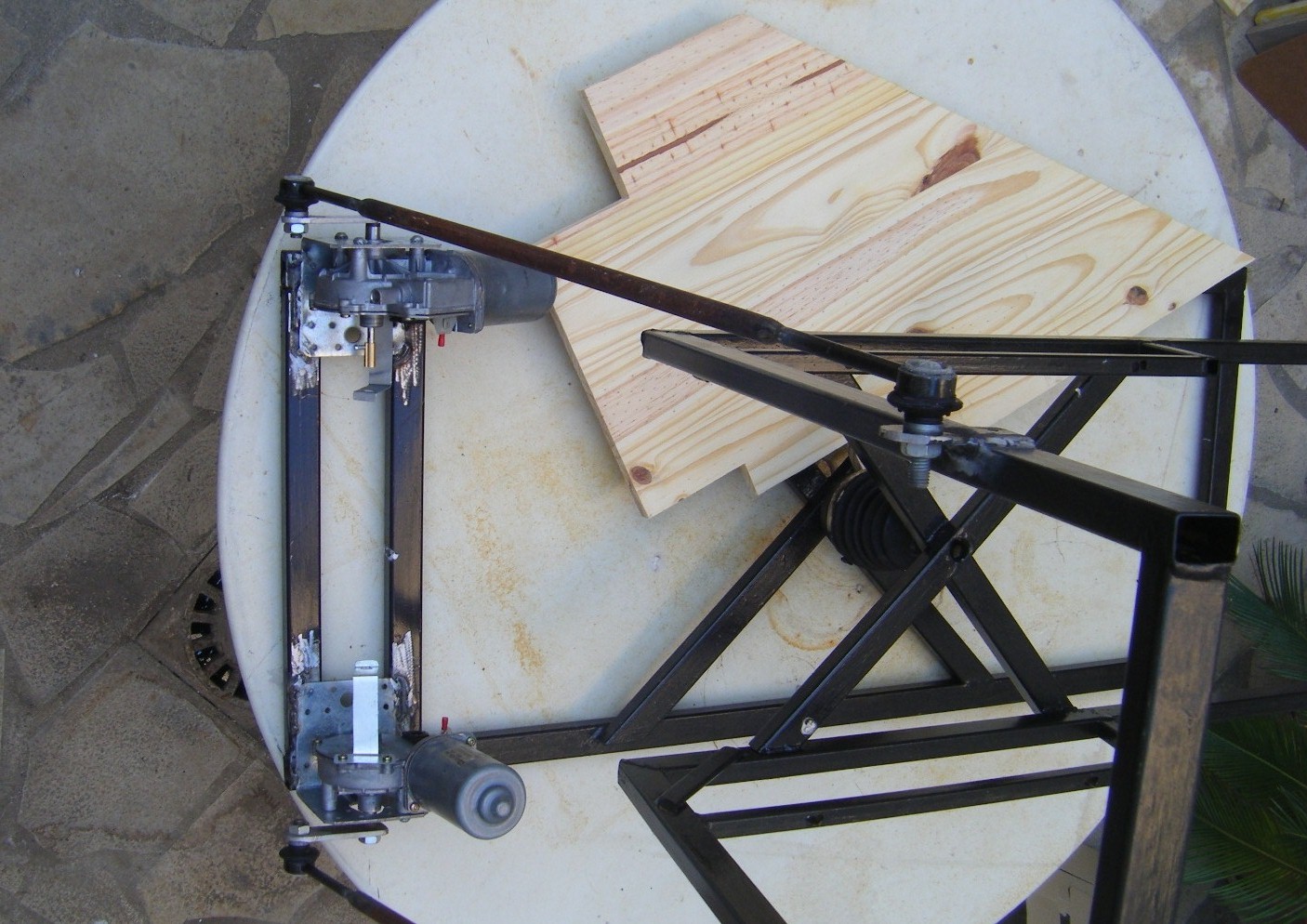
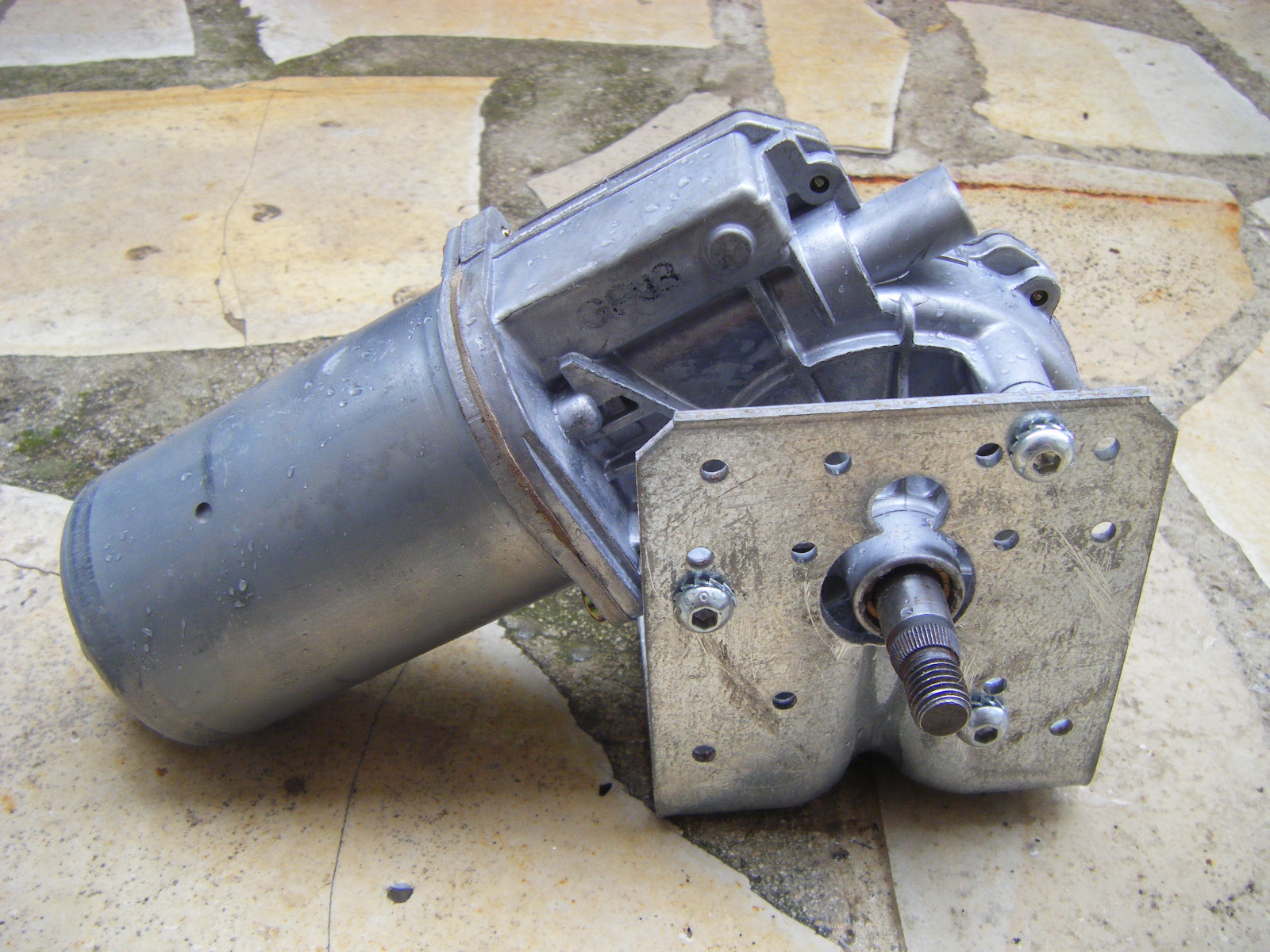
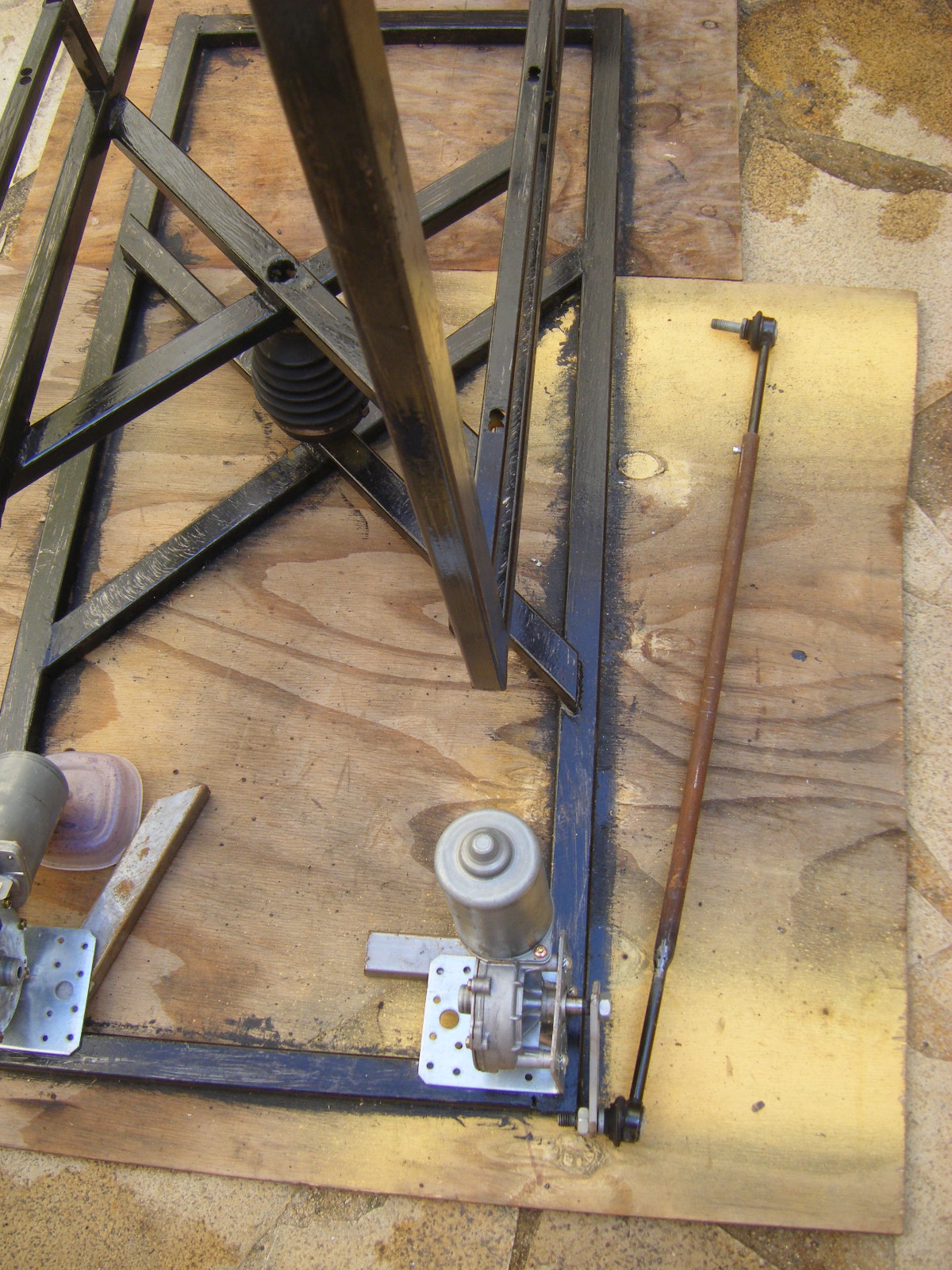
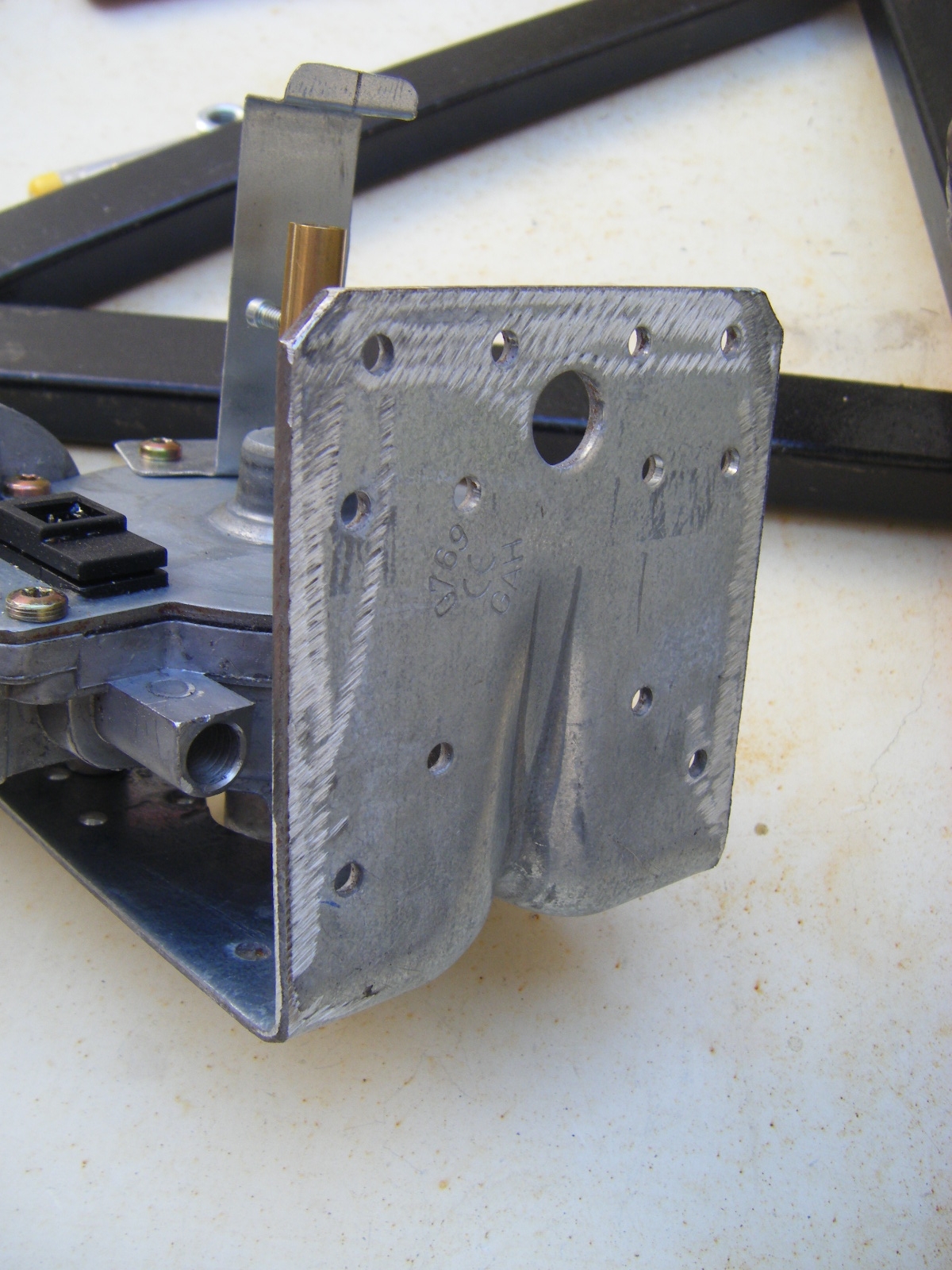
Voici les Smolka et une platine de fixation (équerre de charpente de chez Casto 90 x 95 x 2,5 mm = 3€20)

je n'ai pas pu monter symétriquement les deux moteurs du fait de leur forme : la patte n'est pas assez haute pour cela >:(
tant pis, ce sera le style !
Si vous le pouvez, réalisez une patte pliée sur mesure avec de la hauteur
-> en vérifiant bien que la bielle pourra tourner à 360°.
Un montage avec 3 vis M6 x 16 et des rondelles freins (ou écrou nylstop)
Récupération de biellette de direction (choisies à la casse 15€) :

Pour les pattes :
voici donc quelque chose d'assez costaud (taillé dans de la récup) :
- entraxe 65 mm (finalement)
- épaisseur 5 mm

et
un coup de lime ronde pour ébaucher le cône de 18° : ça se bloque bien
sur l'arbre. En serrant bien fort, les cannelures s'impriment dans
l'acier
quand on présente le tout : ça donne à peu près ça
:fleche: conclusion personnelle : je conseille les rotules embout
femelle et de la tige filetée + contre-écrou : bien plus facile à régler
que mes assemblages soudés ! j'ai dû faire un réglage avec une vis de
pression pour préparer la mise en place avant soudure : c'est
inutilement long >:(
fixations définitives des supports moteurs et bielles
ponçage des bords pour enlever le zincage de l'équerre (sinon ça se soude mal)
j'ai
vérifié le bon alignement des moteurs avec la partie supérieure (= j'ai
compensé un petit décalage angulaire lors de la soudure du cardan)
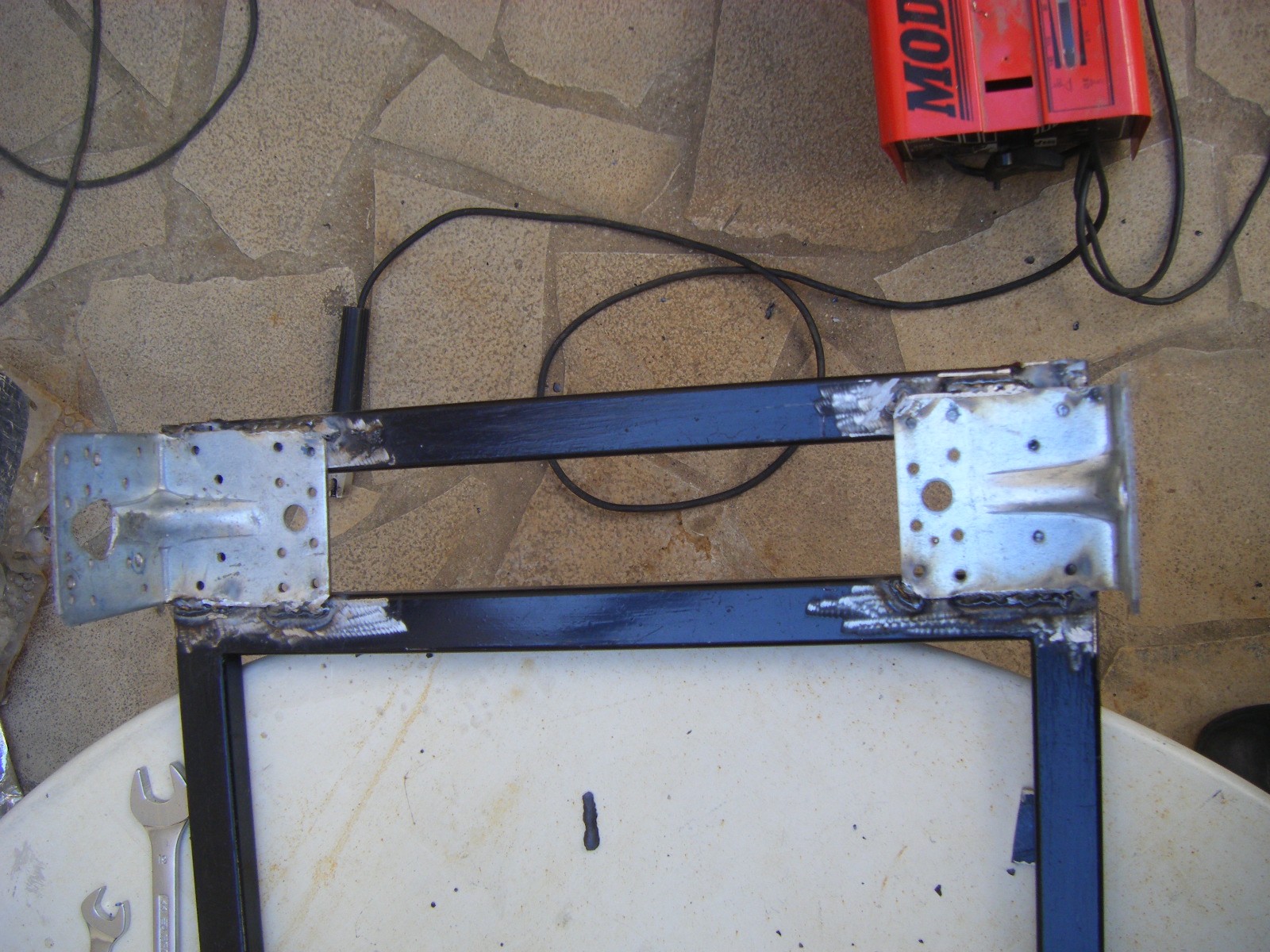
Edit : les supports moteurs ne sont pas assez rigides ! ils bougent sous les contraintes.
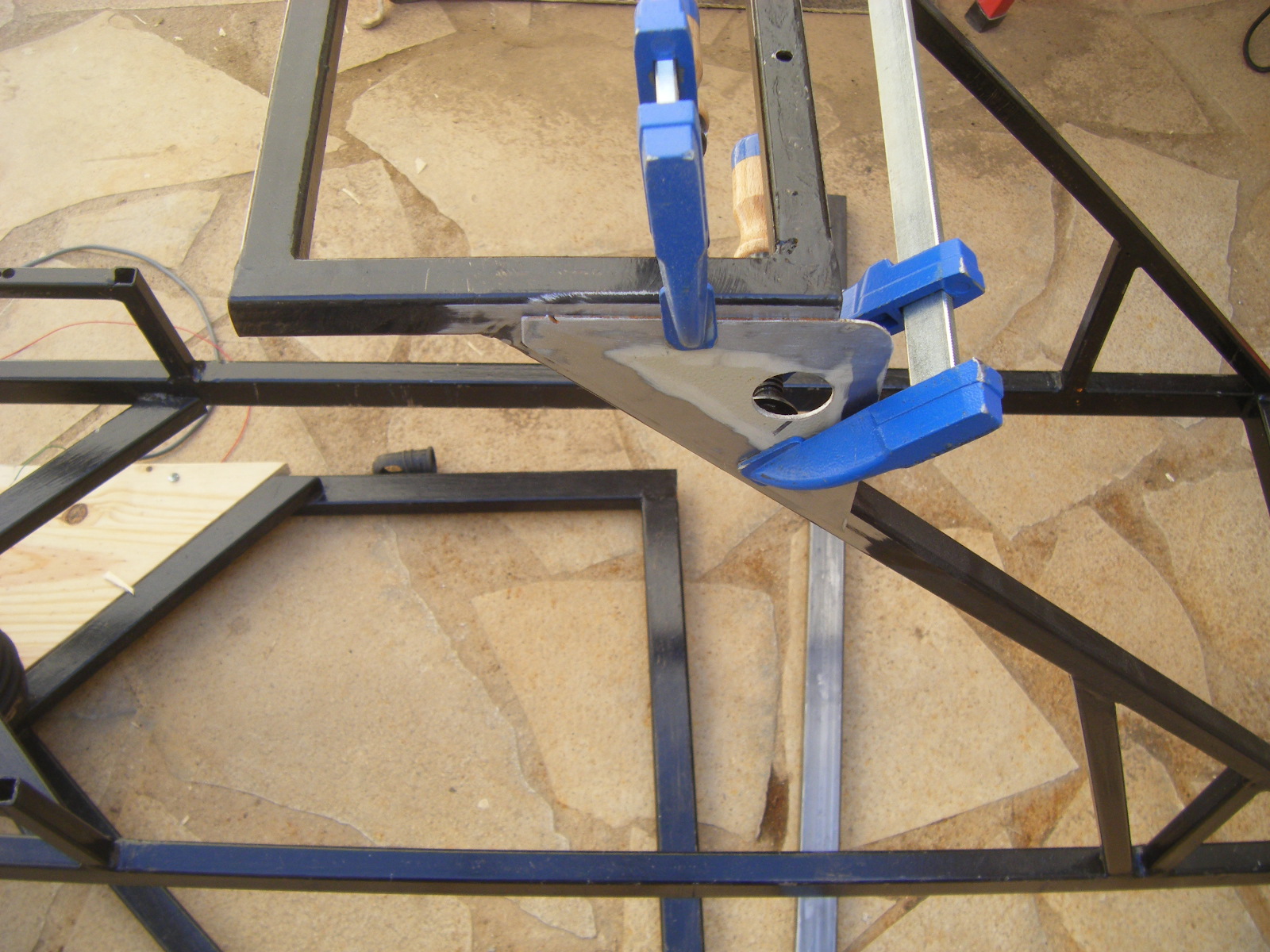
solution voici des goussets pour plus de rigidité

et j'ai vérifié que la bielle pouvait tourner sans entrave à 360° :exclam:
n'hésitez pas à faire pareil (un tour complet est vite arrivé :)

ici l'assemblage de la bielle avec la partie mobile : sur une patte en partie haute.

Au départ, l'idée était de percer directement dans le tube
rectangulaire ... mais la partie filetée de la rotule était ensuite trop
courte pour l'écrou.

Je pense concevoir un capotage pour se protéger des moteurs et bielles.
Fixation des bielles sur le cockpit :
on remarque l'empreinte hexagonale creuse d'origine : bien pratique pour serrer son écrou nylstop par exemple ![]()
ça marche bien pour en haut côté siège.

Pour
l'extrémité côté moteur, j'ai raccourci la longueur de la tige filetée
pour que ça puisse tourner à 360° sans buter : là, c'est moins drôle
parce que la tige filetée montée sur rotule, tourne sur elle-même quand
on force pour serrer le nylstop :'(
donc un trait de scie à métaux assez profond pour engager un tournevis pendant qu'on serre l'écrou à la clef plate.

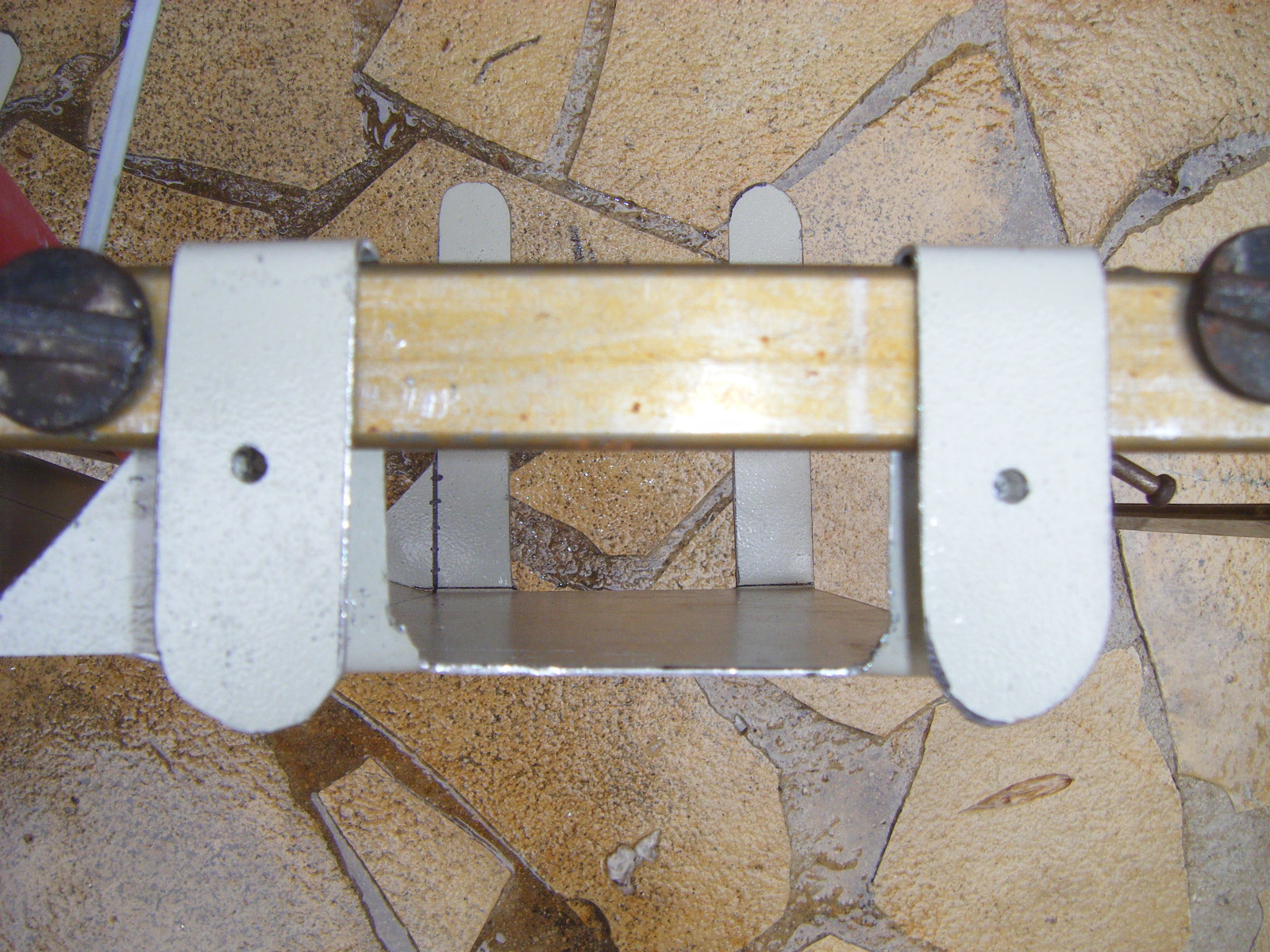
Pour
le trait de scie : monter un écrou normal sur la tige, puis serrer
l'écrou dans l'étau (pour ne pas abîmer le filetage) et scier !