Quelles forces physiques s'appliquent à votre véhicule quand vous pilotez.
Les explications de notre ingénieur.
La dynamique du véhicule, notre cœur de métier.
Il faut la comprendre, la maîtriser pour préparer un véhicule et guider son pilote pour en tirer les performances maximales.
C’est la capacité à prendre toutes ces forces en compte qui fait qu’un simulateur de pilotage est bon ou pas. L’ordinateur doit être capable de calculer en temps réel tous les efforts agissant sur le véhicule. Plus il gère de paramètres plus le simulateur est bon.
Pour comprendre la dynamique du véhicule il est essentiel de connaître et de comprendre les 3 lois de Newton :
1- Principe d'inertie : « Tout corps persévère dans l'état de repos ou de mouvement uniforme en ligne droite dans lequel il se trouve, à moins que quelque force n'agisse sur lui, et ne le contraigne à changer d'état. » C'est cette notion d'inertie qui est au cœur de tout nos problèmes. L'inertie s'oppose, à la mise en mouvement (accélération), à l'interruption du mouvement (freinage), mais aussi au changement de direction (prise de virage). L'inertie I d'un corps est le produit de la moitié de la masse du véhicule M (en N) par le carré de la vitesse V (en m/s).
I = 0.5 * M * V²
2- Principe fondamental de la dynamique de translation : « Les changements qui arrivent dans le mouvement sont proportionnels à la force motrice ; et se font dans la direction dans laquelle cette force a été imprimée. » Ici est introduit la notion de variation de la vitesse, donc une accélération. Une force F (en N) appliquée sur notre véhicule en son centre de gravité (CdG) modifie la vitesse du véhicule dans la direction et dans le sens de cette force. Ainsi selon que la force est "motrice" (même sens que le mouvement du véhicule) elle accélère notre véhicule, si elle est "freinante" (sens opposé au mouvement du véhicule) elle ralentit le véhicule. Cette force F est le produit de l'accélération ∝(en m/s/s) (modification de vitesse donc positive ou négative) par la masse du véhicule M (en N) .
F = M * ∝
3- Principe des actions réciproques : « L'action est toujours égale à la réaction ; c'est-à-dire que les actions de deux corps l'un sur l'autre sont toujours égales et de sens contraire. » Ainsi nos pneus agissent sur la piste, mais la piste agit de manière égale et opposée sur nos pneus.

Véhicule immobile:
Ainsi ces lois nous permettent d'écrire qu'un véhicule immobile est en équilibre car la somme des forces qui agissent sur lui est nulle.
Quelles sont ces force ?
Le poids P (kg) : produit de l'accélération de pesanteur g par la masse M du véhicule P = g*M. Cette force est constante, appliquée au CdG, verticalement vers le bas.
La réaction Fav de la route sur les roues avant.
La réaction Far de la route sur les roues arrière.
En équilibre : P +Fav + Far = 0, soit P = Fav + Far
Sur notre schéma l représente l'empattement du véhicule.
La distance D2 représente la position de l'essieu arrière par rapport au CdG. Cette valeur influence la répartition des masses avant/arrière.
Far = (P*D2)/l
Fav = (P*(l-D2))/l
Aussi si le CdG est au milieu du véhicule on a : D2 = 0.5 * l
Far = P*(0.5*l)/l = P * 0.5
Fav = P*(l-(0.5*l))/l = P*(0.5*l)/l = P*0.5
Fav+Far = 0.5*P+0.5*P = P
Soit Fav=Far = 0.5 P. Ici nous venons de montrer que si le CdG se trouve "au milieu" du véhicule alors la répartition des masses avant/arrière est identique. C'est le cas de figure idéal, mais cela peut varier en fonction de l’architecture du véhicule.
Transfert de charge - Longitudinal (axe X)
Aussi en fonction de différentes données à un instant T cette répartition peut changer. C'est ce qu'on appel un transfert de charge. Car ce n'est pas la masse du véhicule qui ce déplace, mais bien les efforts qui se "transfèrent" pour obtenir une nouvelle situation d'équilibre.
Nous avons vu que l'inertie s'oppose à toute variation de mouvement du véhicule. Ainsi en phase d'accélération, l'inertie tend à maintenir le véhicule immobile (ou à sa vitesse) en s'opposant à la force motrice exercée par la route sur nos roues.

Ce qui crée le transfert de charge, c'est que le point d'application de ces deux forces diffère. L'inertie s'applique au CdG (G2) de notre véhicule et la force motrice sur les roues (A). La distance entre ces deux points (h2) fait que nous avons un couple qui se crée.
En l'état, le véhicule devrait tourner sur lui même (rappelez vous Fast and Furious quand la Dodge Charger se cabre).
Pour garder ses quatre roues au sol, il faut que la somme des forces qui agissent sur le véhicule soit nulle.

Aussi le couple que crée notre accélération est un potentiel de transfert de charge, selon la direction on l'ajoute ou le retranche en A et inversement en B.
Transfert de charge = (Fi*h2)/l
Dans notre cas nous accélérons, le couple est anti horaire donc + en A et - en B.
Nous ajoutons ce transfert de charge à l'expression de Fav et Far.
Fav = (P*(l-D2))/l - (Fi*h2)/l
Far = (P*D2)/l + (Fi*h2)/l
Aussi nous savons que Fi = 0.5*M*V²
Que pour homogénéiser les unités nous remplacerons P par M
Ainsi nous pouvons écrire les équations génériques:
Fav = (M*(l-D2)+ 0.5*M*V²*h2)/l
Far = (M*D2 + 0.5*M*V²*h2)/l
Les éléments qui entrent en jeu dans le transfert de charge sont donc:
- La masse du véhicule - Fixe
- La position du CdG - Fixe
- La hauteur du CdG - Fixe
- L'empattement du véhicule - Fixe
- La vitesse du véhicule - Variable
Transfert de charge - Latéral (axe Y)
Nous allons maintenant étudier le transfert de charge dans le plan transversal du véhicule, pendant un virage. Considérons le véhicule sur sol plat à vitesse constante.
Nous avons vu que l'inertie s'oppose à toute variation de mouvement du véhicule. Dans ce nouveau cas elle va s'opposer à ce que le véhicule change de direction.

Qu'est ce qui ce passe quand on prend un virage ?
Nous avons une vitesse linéaire, donc une direction et un sens. Quand on tourne le volant on demande au véhicule de changer la direction du mouvement.La force d'inertie Fi tend à faire continuer le véhicule dans la directions précédente.
Nous avons donc maintenant un effort qui se décompose, en une composante dans l'axe longitudinal du véhicule et une dans l'axe latéral du véhicule Fc.
Cette composante latérale n'est autre que la force centrifuge. (Nous le considérons et nous n'en ferons pas la démonstration).

Le nouveau schéma que nous avons ressemble fortement au précédent.
La force qu’exerce la route sur nos roues n'est plus motrice , mais une réaction au grip du pneu. Le principe reste identique, la distance h2 entre les points d'application crée un couple correspondant au transfert de charge gauche/droite.
Dans le plan transversale nous utilisons la voie v comme dénominateur,
Transfert de charge = (Fc*h2)/v

Nous ajoutons ce transfert de charge à l'expression de Fg et Fd.
Fg = (P*(l-D1))/l - (Fc*h2)/l
Fd = (P*D1)/l + (Fc*h2)/l
La force centrifuge est fonction de la masse (M),de la vitesse (V) et du rayon du virage (R
Fc = (M*V²)/R
Pour homogénéiser les unité nous remplacerons P par M
Ainsi nous pouvons écrire les équations générique:
Fg = [M*(l-D1)+ ((M*V²)/R)*h2]/v
Fd = [M*D1 + ((M*V²)/R)*h2]/v
Les éléments qui entrent en jeu dans le transfert de charge sont donc:
- La masse du véhicule - Fixe
- La position du CdG - Fixe
- La hauteur du CdG - Fixe
- La voie du véhicule - Fixe
- La vitesse du véhicule - Variable
- Le rayon du virage - Variable
Transfert de charge - Global
Nous avons donc expliqué le transfert de charge longitudinal, puis transversal. Il est aisé de comprendre que pour calculer la charge sur chaque roue (poids aux roues) il faut combiner les équations.
Mais il n'y a pas que les variations de mouvement du véhicule qui rentrent en compte dans ce calcul. L'inclinaison du sol, les bosses, le vent, .... tous les éléments extérieurs possibles entrent dans ce calcul. C'est ce qui rend complexe un tel calcul en temps réel.

Hauteur du centre de Gravité
Nous avons vu, que la hauteur du centre de gravité (h2), influence le transfert de charge dans tous les plans. C'est pourquoi les constructeurs essayent d'avoir le centre de gravité le plus bas possible.
Plus la distance h2 sera faible, moins nous aurons de transfert de charge, donc moins la répartitions du poids aux roues, en sera modifiée. Conservant ainsi le réglage de départ.
C'est intéressant en virage, moins de transfert = plus de grip potentiel. Mais si on annule le transfert de charge longitudinal cela pourrait être négatif, alors il faudrait revoir nos notions de pilotages; On reviendra dessus dans la description du freinage dégressif.










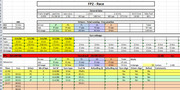
 du team ayant en charge tout le parc voiture.
du team ayant en charge tout le parc voiture.


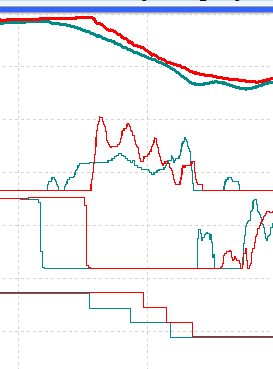 <========En bleu la début de journée, un frein "standard" - en rouge une attaque franche et du dégressif.
<========En bleu la début de journée, un frein "standard" - en rouge une attaque franche et du dégressif.