Bonjour tout le monde,
parti de RFR fin 2008 parce que la vie est ainsi faite et que la charge de modérateur global prenait beaucoup de temps, j'y reviens 10 ans après et je retrouve RFR sous sa nouvelle forme, ce n'est plus Sticky ou Desmo mais ça vit encore !
Donc félicitations à Sticky-Fingers avec qui on avait quand même pas mal bossé sur ce forum.
Responsable Moto au début avant d'enfiler le costume de Gros Mechant (ah non c’était pas ça les GM  ) je reste un motard éternel et j'ai depuis la fin de GP500 eu du mal à trouver un logiciel sérieux.
) je reste un motard éternel et j'ai depuis la fin de GP500 eu du mal à trouver un logiciel sérieux.
J'oublie évidemment les Ride et autre saloperies fournies par Milestone, ce sont des catastrophes en terme de simu même si c'est beau ce dont je me fous royalement.
Il y a mes yeux à ce jour un soft valable et peut-être bientôt 2.
Dans un premier temps, GPBikes semble idéal. Il est très fort ce log mais souffre d'une lenteur dans l'évolution qui confine parfois à la reculade. Le boss Mr Piboso fait en même temps plusieurs log (WRS, MXB et KRP pour le Karting). Il est donc débordé, pas speedé mais son log est bien sauf la dernière mouture, la Béta 14 qui représente, à mes yeux, une marche arrière même si le code réseau s'est amélioré.
Toujours est-il que j'ai quand même passé de bonnes sessions de courses dessus avec quelques fins pilotes et j'ai une chaine YT (Artazole) ou vous pourrez voir certaines de ces vidéos.
Bon mais la raison de mon topic et de mon retour sur RFR n'est pas là.
J'ai écrit à Etienne (Gamerseed) sur son site pro, mais je crois que ça a merdé...
J'ai, en accord avec son inventeur (Allan Beaton) récupéré des pièces et investi dans du matériel pour créer ce guidon.
Chaine YT : https://www.youtube.com/channel/UC5XtfGPEVrY2r0_vB0U3i9A
Guidon qui comporte 5 potentiomètres, 16 boutons, un "siège" avec vitesses et frein AR, tout est actif comme sur une moto. Et ça fonctionne impec basé sur un Leo Bodnar BU0386, aucun problème, très fiable et très sympa à utiliser.
Mais et pour ceux qui sont motards, vous vous en doutez, il faut des "retours", ça aide beaucoup. En effet, si on oublie le coté Moto et qu'on prends un volant FFB qu'on branche en lieu et place du guidon, bon c'est incomprehensible à piloter mais bon oublions cela, les effets FFB du jeu dans le volant permettent de mieux tourner parfois qu'avec un guidon...
Donc le gars que je suis se dit : Ajoutons le FFB sur le guidon.
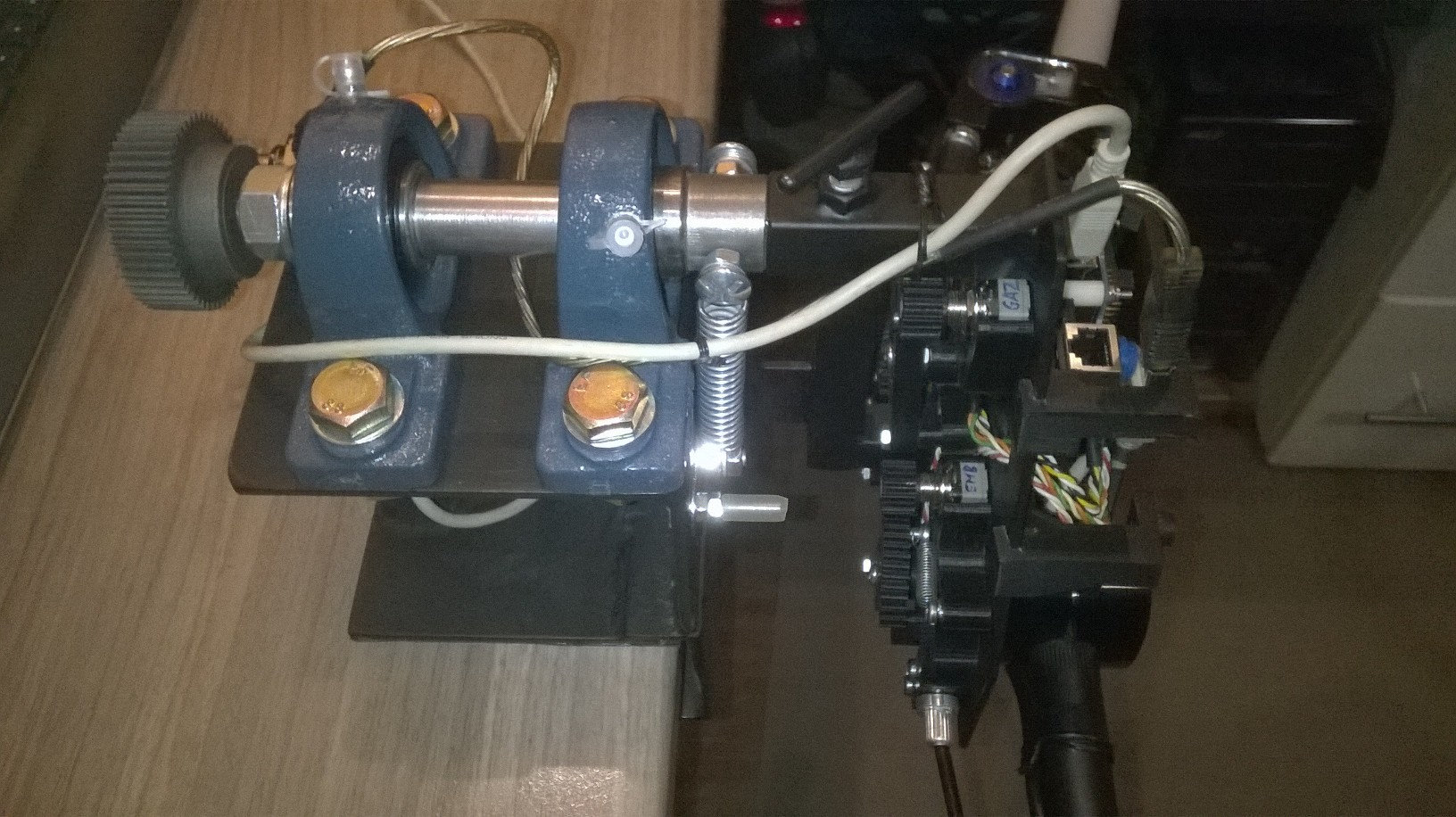
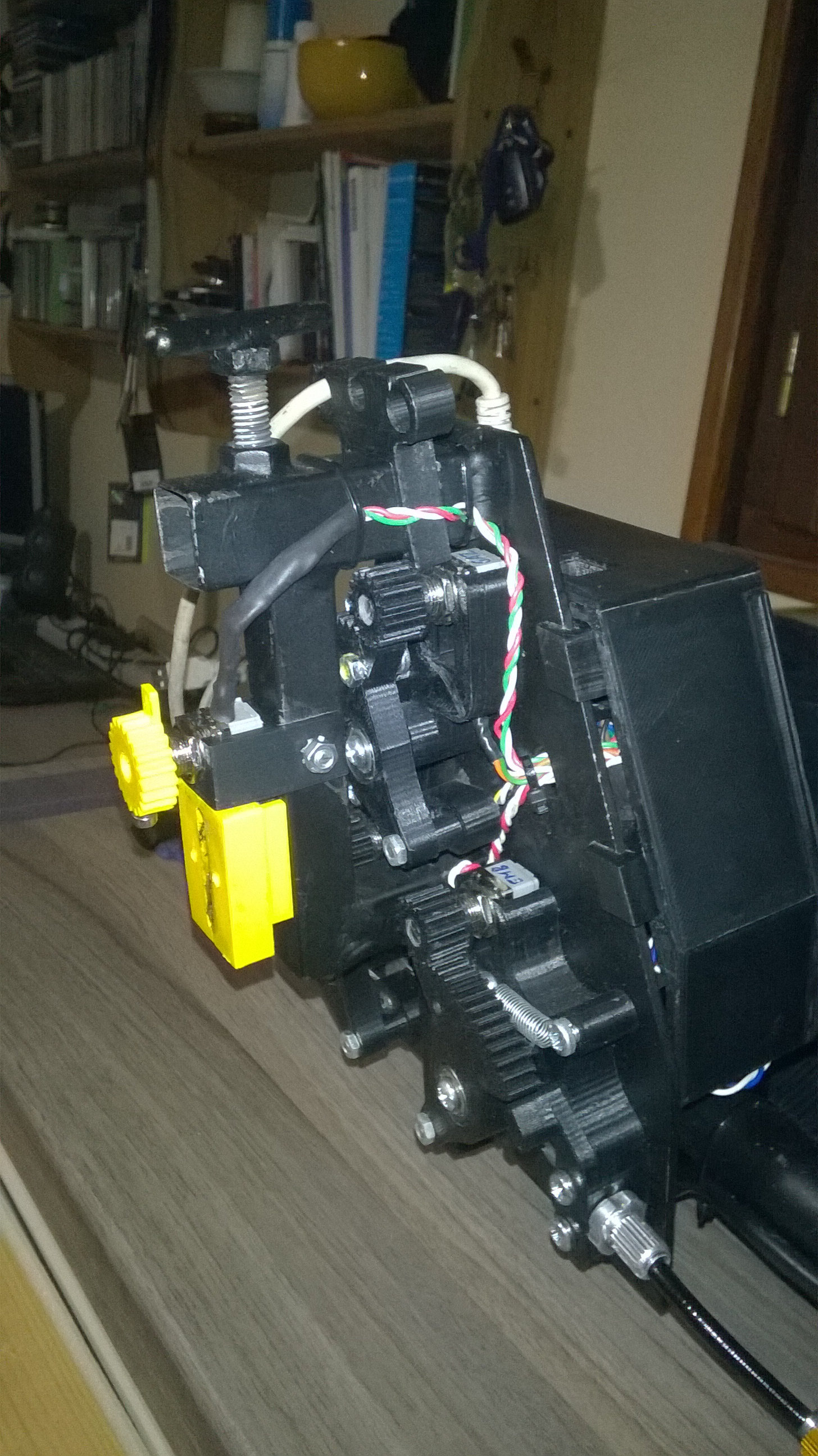
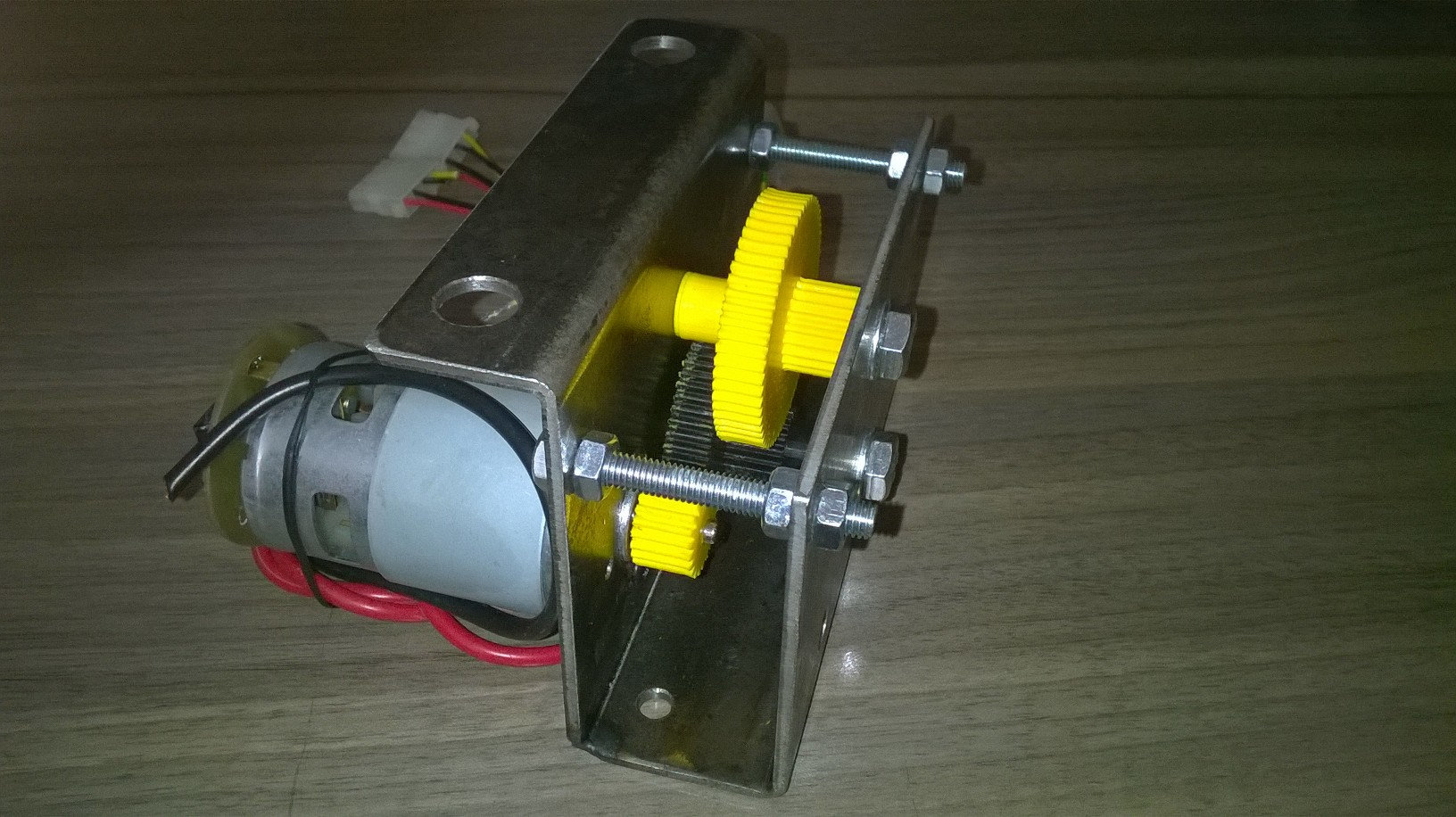
Et pour ce faire, d'abord la mécanique donc j'ai pondu des pièces en ABS avec mon imprimante et créer un réducteur de rapport 58:1 avec un moteur DC 24V et un gros pont H en 43A avec une alim 24V 360W. Et ça marche impec, j'ai branché le moteur, ça tourne (trop) très bien (la grande roue 150 dents est en ABS/Kevlar).
Et ensuite, il faut remplacer le Leo Bodnar par un Arduino Leonardo qui à priori peut récupérer le FFB du câble USB.
Et là, c'est le drame 
Enfin surtout pour moi.
Je fais quoi ? je branche ça ou ? les diagrammes récupérés ça et là sur Internet sont différents, obscurs en fonction des pièces utilisées, et puis je n'ai aucune notion de codage je sais juste utiliser Arduino IDE puisque c'est ainsi qu'on met à jour le firmware d'une imprimante 3D (Tevo Tornado customisée en ce qui me concerne)
Je vais donc ici reproduire le post que j'ai fait ailleurs en espérant que cela sera assez clair pour Etienne, parce que je vais le diriger ici pour qu'il puisse répondre à ma demande. Et comme je l'ai écrit sur son site marchand (mais je crois que ça à merdé), il s'agit d'une demande donc d'une relation commerciale, je veux bien payer si j'obtiens ce que je demande. Mais il existe des boitiers tout fait, plus qu'a y brancher un guidon, fort chers (1000€) qui font tout ça très bien, ce n'est évidemment pas la somme à laquelle je veux prétendre sinon je m’achète un Lean GP, superbe structure simulateur....
Le projet :
Un joystick avec retour de force (FFB) issu d'un port USB. Le joystick sans FFB est déjà fait et est fonctionnel. L'objet du projet ici est d'y rajouter le FFB.
Ce projet s'articule autour de 3 points principaux :
1. la structure avec beaucoup de pièces issu de ma Tornado.
2. la partie mécanique de lecture/renvoi des informations nécessaires
3. le coté électrotechnique nécessaire pour rendre 2 possible. (c'est là que je suis une brêle total)
Et c'est dans le 3 que je souhaite ici venir vous questionner.
Actuellement, il y lecture des positions de potards (5) et des boutons via une matrice 32 boutons sur un Leo Bodnar BU0386 et sa matrice dédiée.
http://www.leobodnar.com/shop/index.php?main_page=product_info&cPath=94@@@WCF_LITERAL_AMP@@@products_id=204
http://www.leobodnar.com/shop/index.php?main_page=product_info@@@WCF_LITERAL_AMP@@@cPath=94@@@WCF_LITERAL_AMP@@@products_id=274
Il y a 5 voies parce que : Frein AV, Frein Ar, Accelo, Embrayage et direction/angle moto. Les boutons, il en faut un certain nombre de base et après c'est du luxe de rajout. Mais certains sont impératifs. Par exemple : Vitesse+ et Vitesse-... limiteur au stand et tout ce qui attrait au changement de carto, d'AW, d'EB....
J'ai réalisé un réducteur de ratio 58:1 en roues d'ABS. Et la structure pour le porter. Et l'adapter au corps fixe de la Sapetoku. En partant d'un moteur costaud en 24V et une alim de 360W (que j'ai déjà) je voudrais y ajouter un Arduino Leonardo en lieu et place du Leo Bodnar pour récupérer ce qui attrait au FFB et le traduire en pilotant le moteur 24V. J'ai aussi un Driver moteur qui je crois, je vais rechercher tout cela, peut prendre 43A !!! J'ai aussi démonté un encodeur rotatif d'une imprimante Brother (ma vieille MFC5490CN, je l'aimas tant.. 2005-2018 sniff) et donc en dehors de l'Arduino je pense que j'ai tout. Pour info, un volant FFB "normal" est sur un ratio 28:1 et sur un p'tit moteur 12V.
Sauf que je ne sais pas comment faire pour relier tout cela, réutiliser ma matrice de Léo Bodnar (ce serait bien, ça évite les diodes, etc...et ça permet de tout centrer pour le câblage).
J'ai aussi mis une prise RJ45 sur le "pédalier" (vitesses et frein AR) qui remonte au guidon via un câble réseau et se replante dans une autre RJ45 et ensuite direction la matrice pour les vitesses et le Leo Bodnar pour le potard du frein AR.
Je pense que si on met le moteur dans la structure, et le bloc alim dédié avec, tout ce qui est alim en 24v sera relié directement. Mais le Léonardo étant collé dans le guidon, il faudra remonter les infos de l'encodeur et du driver moteur. Donc un certain nombre de fils (7 je crois qu'il disait mon copain - 4 pour le moteur - 3 pour l'encodeur) et donc j'ai prévu des RJ45 sur pcb en plus pour faire ça propre.
Je vais essayer d'être exhaustif et de ne rien oublier.
Déjà dans un premier temps, ce qui m'amène vers l'Arduino Léonardo c'est cette vidéo : exactement ce que je veux mais pour une moto, pas un avion. Il est évident que je vais aussi rendre possible le changement du guidon par un volant, avec un second Leo Bodnar mais là, les limiteurs seront à 270° et non 60° comme sur la moto. Suffira de sortir le guidon et d'y placer un volant, relier les RJ, l'USB et c'est parti !
Video DIY Sterring AVEC FFB Arduino
On peut notamment voir dans cette vidéo qu'il existe un log (venant de RFR - RacingFR) qui permet de filtrer tous les effets FFB. C'est exactement de cela dont j'ai besoin pour mon bidule.
Pour les intéressés, en Anglais, la vidéo - non publique, merci de respecter cela - que j'ai faite en Avril sur l'avancé du projet, il est évidemment fini dans la partie "normale" et fonctionne fort bien mais sans FFB, dur d'avoir le ressenti de la piste, c'est déjà assez folklo comme ça...
Vidéo Artazole sur la Sapetoku
GP Bikes (démo gratuite - 263Mo)
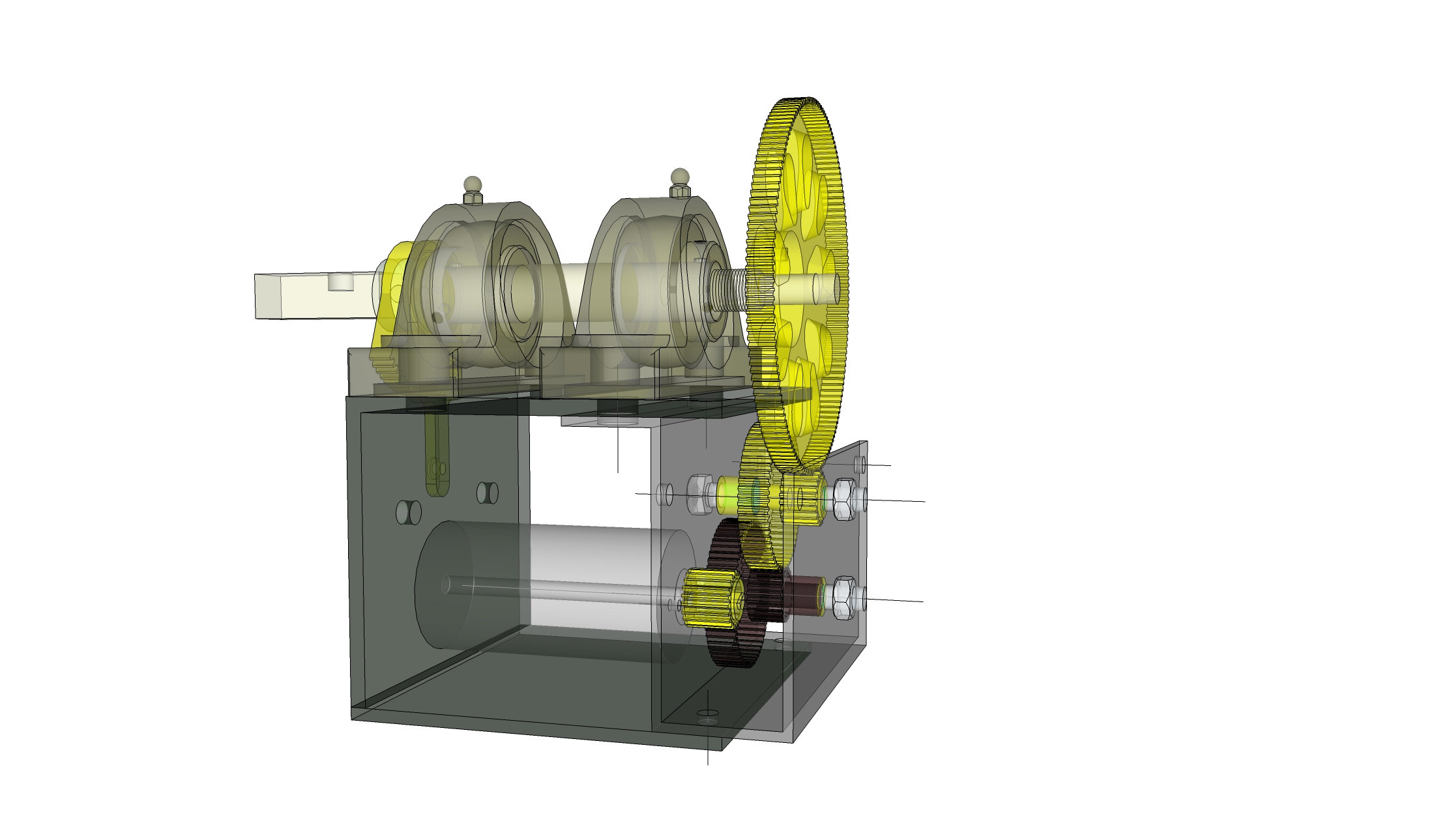
Suivent quelques clichés de l'avancement et des principes sous Sketchup. Tout l'engrenage est fait en ABS, à 80% d'infill. La boite du Leo Bodnar, les systèmes qui permettent de donner une rotation sur une traction de câble via un engrenage, tout ce qui est dessous est en ABS et est imprimé 3D.
Il y a plusieurs évolutions sur ces clichés, par exemple le potard d'angle pris par la moto est passé du bout de l'axe en métal à dessous le guidon, plus les 3 fils à faire courir.
En clair, je cherche un moyen "tout fait" ou pas super mega compliqué à mettre en place pour récupérer le FFB. Le logiciel qu'Etienne montrait (Wheelconfig) permettait en sus de filtrer les effets FFB ce que je voudrais au plus haut point. Merci d'avoir lu et tenu jusque là !