

ça n'a pas l'air de bouger des masses...
Messages de LeboisVR
-
-
lolof1 c'est TVA incluse donc en théorie pas de douane...
-
Chez moi ça marche normalement Marc_63
Et magicfr la motion compensation fonctionne aussi. J'ai fabriqué un support pour la manette si ça t'intéresse
")
Et j'ai fait un tuto en anglais.
-
Merci les gars mais j'ai trouvé
J'ai mal inversé certains effets
-
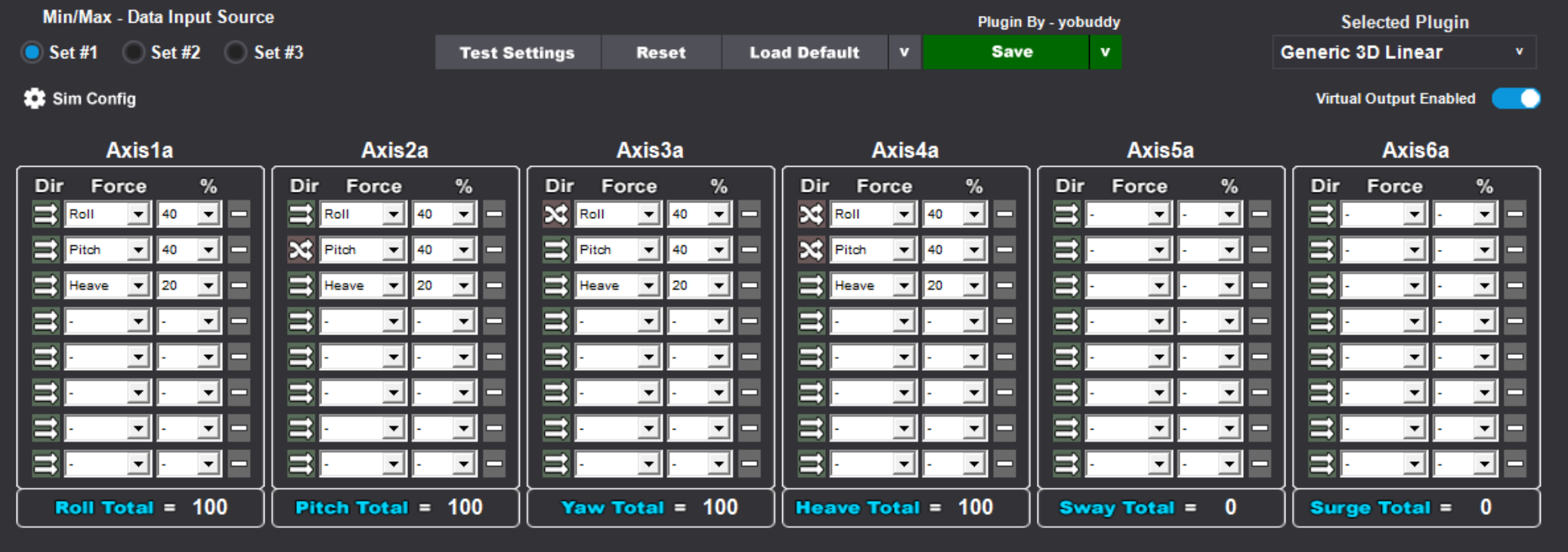
Il y en a qui s'y connaisse sur simtools ? J'essaye d'assigner les axes pour envoyer la position cible de chaque vérin mais ça ne marche pas :
-
bon bah mon pédalier m'a lâché pendant la course...
Voici ce que je voulais vous présenter :
Le support de manette Pimax Crystal : permet de maintenir fermement une manette afin de l'utiliser comme point de référence pour les simulateurs de mouvements : -
Cette aprem je présente une ptite nouveauté pour les possesseurs de Crystal lors de mon live (14h-20h) : https://www.twitch.tv/lebois_srt

-
Le problème c'est le prix.... Mettre plus de 1000€ dans un casque bah .... Faut pouvoir quoi...
-
franchement ça va... la ptite déception c'est d'avoir un FOV très carré mais sinon ça va.
-
Alors...je vais être clair, t'es un gros cran au-dessus de tout le monde ici (moi y compris)
Mais ce que tu dis est très clair. J'aurais une question (je pourrais googliser mais vu que t'es très clair ta réponse sera forcément meilleure) c'est quoi la diff entre astable et monostable ?
Du coup je commence à digérer tes posts. Question: à ton avis c'est chaud de se faire son propre driver ? Vu de loin c'est juste une armée de puces MOSFET (j'ai plus la ref en tête)
-
J'ai lu que le début du début mais :
Filtre RC j'avais essayé et ça n'avait pas marché
Autant utiliser un dac du coup
Le double fan je n'arrive pas à me rappeler pourquoi je n'ai pas fait ça...
-
-
Pc en wifi et répétiteur c'est mort... J'ai fait le test avec PC en wifi et PC en ethernet et la diff est certaine. Pareil avec casque à côté de la box et casque loin de la box
-
oui c'est le seul jeu cross plateforme avec rec room que je connaisse. Ah peut-être hyperdash aussi
-
Y'a pas longtemps avec un pote j'ai fait un ping pong.
Pour dialoguer on a utiliser le sytème de discution intégré au pico4.
JE N'AI JAMAIS EU UNE DISCUTION AUSSI CLAIRE !!! Je ne sais pas si c'est le micro qui est ouffissime ou les algorithmes, mais WOUAH ! -
je ne sais pas quel est le dernier, mais perso VD j'ai pas trouvé ça foufou malgré ce que les gens en disent.
PS : par contre moi je suis hyper satisfait du pico -
Les SRT80 sont push-pull... si t'es pas pressé je peux t'en faire un.
-
Traduire par : tu branches ça marche et ça fait plein de lumières x)
-
Si vous voulez jeter un coup d'oeil au manuel : https://lebois-racing.com/wp-content/upl…-Box-Manual.pdf
-
Voilà la Control Box Competition est dispo! Elle est à 160€ sur Etsy et j'offre le port si vous passez en direct

Presentation
La Control Box Competition est la solution Plug And Play pour profiter à fond des capacités des vérins SRT80.
Le PCB multi-couche est optimisé pour réduire les interférences électromagnétiques et permettre des signaux de meilleur qualité.
Résultat : on tire profit à 100% des vérins en toute sécurité.
La Control Box Competition est basée sur une carte Arduino Leonardo. Les pins utilisés sont les mêmes que pour les OpenSFX, donc la Control Box peut être utilisée aussi pour ces vérins.
Elle est livrée déjà flashée et prête à l’emploi avec le profil FlyPT. L’ajout du cinquième vérin se fait sans modification du code, il faut seulement adpater le profil FlyPT en apportant les modifications indiquées dans le manuel.
Connecteurs DB25
La carte est prévu pour utiliser des connecteurs DB25 male-male. Voici deux références : Amazon, Aliexpress.
Leds d’état
Il y a une led indiquant que FlyPT est connecté, et 5 leds qui indiquent si les drivers sont opérationnels.
Securité
Le PCB intègre la détection des butées sur les vérins 1 à 4 : si un de ces vérins tentent de dépasser ses butées, la carte désactive les drivers, et se met en erreur (led rouge qui clignotte).
E-Stop
La carte est livrée avec un port pour l’arrêt d’urgence. L’utilisation du E-Stop reste optionnelle.
Cinquième vérin
Le cinquième vérin est a priori un vérin nécessitant une calibration, comme c’est le cas pour un montage Traction Loss. A la connexion avec FlyPT, le vérin va se rétracter jusqu’à arriver en butée, butée détectée par le driver. La vérin va ensuite se détendre pour atteindre la position du milieu. A partir de ce moment là, il est uniquement contrôlé par FlyPT.