hm... je vais reposer ma question pour être sûr de me faire comprendre
Est-ce qu'on peut considérer que le comportement du driver est uniquement conditionné par les ordres qu'il reçoit, et n'a rien à faire de la vitesse à la quelle tourne le moteur, ou de la résistance que rencontre le moteur ?
C'est que je me demande si le driver aurait aussi cramé si le moteur n'était pas bloqué (une fois la position de serrage atteinte).
Mais bon, à mon avis tu fais fausse route à vouloir bidouiller des drives comme ça, sans oscilloscope ni connaissances en électronique, en partant sur des bases chinoises qui ne sont pas protégées, tu risques juste de tout cramer à nouveau sans savoir pourquoi.
On m'a souvent dit ça, j'ai jamais écouté, toujours avancé La dernière fois c'était pour un ampli à tube que j'ai fabriqué : "ça sort du 400v tu vas mourrir !!!". A l'heure où j'écris ces lignes, cet ampli me sort du bon son (et je suis toujours en vie ^^). Ceci dit je comprends tout à fait ton point de vue Etienne. Mais du coup tu verrais quelle autre approche ? Un oscillo c'est pas donné ... (puis je le cramerai aussi )
hm... oui... En fait c'est plus pour le driver que je m'inquiète ^^. Est-ce que pour le driver ça fait une différence que le moteur tourne ou non ?
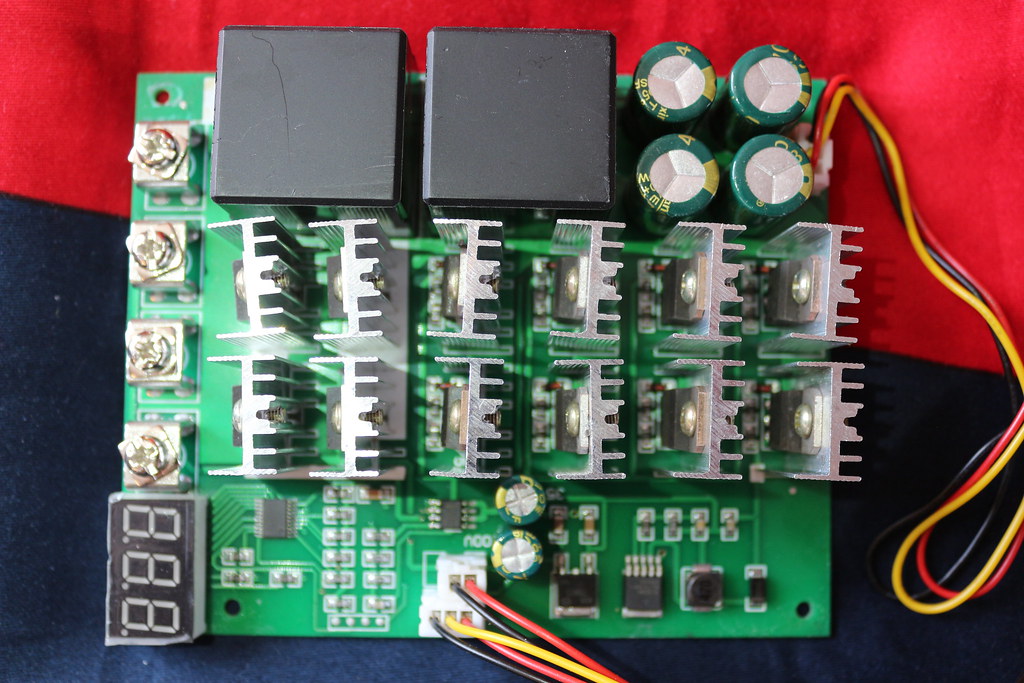
J'ai reçu le driver. Bon visiblement il est beaucoup plus simple que celui que j'avais démonté, tout en étant bien doté. J'ai repéré une ne555. Normalement c'est elle qui émet le signal PWM, donc je vais de me repiquer sur ça.
Par contre je sais pas trop comment je vais m'y prendre... Si mes drivers à usage unique, y'avait une "grosse" résistance. Là c'est du..."petit" (me souviens pas des noms des standards). Y'a la patte du ne555, après ça arrive directement au pied des puces mosfet, avec visiblemet un circuit RC (pour filtrer le pwm ?).
Etienne le soucis c'est que (dans mon cas) le système n'est pas précontraint, donc pour gagner en réactivité, tu es obligé d'utiliser un enrouleur de grand diamètre pour gagner en vitesse. Tu perds donc en force, et tu as donc besoin de pas mal de watt.
J'avais vraiment ressenti la différence (les peu de fois où ça a marché...).
Après je me demande si ça fait une différence pour le driver que le moteur ne tourne pas...
J'ai une ou deux moto monster, je verrai si ça fait l'affaire
Et le ibt je l'ai déjà testé, ça fume immédiatement ! En réalité je pense que la plupart des capacités données sur ces drivers sont mesures avec les drivers plongés dans de l'azote liquide...
On a pas autant de données... c'est du chinois... En théorie c'est sensé faire l'affaire (20a), en pratique si c'est pas plongé dans de l'azote liquide, ça crame très vite...
Je viens de commander celui-ci (60a) en espérant pour le commander en pwm...
Merci à tous pour vos messages !!! Ca motive à fond !!!
Les développements ont repris ! Il reste encore beaucoup de boulot mine de rien, mais la boîte ne fait que s'améliorer jour après jour (sauf les jours où je bosse pas dessus...c'est pas comme le vin tout de même!).
Là je bosse sur le slider. Il doit acceuillir deux contacteurs pour le + et - du mode séquentiel.
Après il y aura la marche arrière à finaliser
Et évidemment le bloc électronique.
Ensuite ce sera la publication ! En thoérie, il y a en pour une semaine. En pratique deux mois
J'avoue que j'ai perdu un certain temps à passer des vitesses dans le vide avec la boîte fixée à l'établi. XD
La version 7.7 a subie de nombreuses évolutions. Côté électronique, c’est le deuxième bloc que j’installe. Le câblage est particulièrement facile. Tout est indiqué, les câbles sont guidés, avec des espaces pour les soudures. Cependant il va falloir revoir la position de la carte Arduino, dont le port USB n’est pas accessible… Ca va être un gros travail… Par contre l’électronique fonctionne parfaitement, et le code est efficace, notamment la fonction debug.
Le châssis en lui-même est très satisfaisant : les parties s’emboîtent bien et viennent se renforcer entre elles. Les différents vissages garantissent les alignements. Je continue d’ajouter des indications afin de faciliter le montage.
Au niveau de la mécanique, pas de grandes évolutions. Cependant je rencontre une nouvelle problématique : j’ai dessiné la piste qui fait la résistance du mode séquentiel de manière à ce que la course du levier soit plus faible que le mode H. Mais par conséquent, l’aimant reste à distance des capteurs Hall. Donc soit je modifie la piste pour que la course du levier soit de même longueur qu’en mode H, soit j’ajoute des contacteurs sur la piste séquentiel. Avec cette dernière solution, la boîte détectera elle-même les changements de modes (en sequentiel, les contacteurs détecteront les + et -, pendant que les capteurs Hall ne détecteront rien). Par contre cela veut qu’on ne pourra pas facilement changer le ressenti du mode séquentiel puisque qu’il y aura les contacteurs sur la piste. Je vais commencer par imprimer une nouvelle piste séquentielle plus longue pour vérifier si c’est acceptable ou non.
J’ai continué à travailler sur l’embrayage pour le rendre plus fiable, et améliorer le ressenti. J’ai aussi ajouté le loquet qui permet de le désactiver. C’est notamment nécessaire pour le mode séquentiel. Au passage, on peut brancher sur la carte Arduino les pédales. Par conséquent, je vais probablement monter le capteur de pression directement sur le cylindre esclave. Ainsi je brancherai le capteur directement sur l’Arduino sans avoir trop de fils.
En l’état, la boîte est déjà particulièrement satisfaisante. Le plus gros problème concerne le positionnement de la carte Arduino. Pour le reste, on peut toujours apporter des améliorations, mais elles ne changeront pas le ressenti pour l’utilisateur final.
Content embedded from external sources will not be displayed without your consent.
Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy.
Le problème c'est que les faits de courses ont ici des impacts beaucoup plus importants que lors de courses normales. Donc il me semblerait normal qu'ils soient sanctionnés différemment.
De manière générale, j'ai vu trop de pilotes piloter comme s'il s'agissait d'une course sur circuit classique. Et je pense aussi que l'Orga, malgré le magnifique travail effectué, aurait d'emblée du poser un cadre beaucoup plus strict.
Si c'est comme ça, prochaine course sur l'oval, je viens parce que je suis inscris, mais il y aura 0 prépa.
EN 150W, je n'ai pas trouvé les mêmes fixations. En 250W, tu as ça par exemple, c'est le même type de fixation, mais ça certain que ce soit exactement les mêmes dimensions.