Oui Riton les deux premiers exemples correspondent à mes idées.
Le souci qui peut il y avoir dans ce cas c'est l'encombrement des moteurs, raison de ma demande ")
La dernière vidéo correspond aussi et elle offre l'avantage de s'affranchir du problème de gène des moteurs entre eux, bonjour l'encombrement par contre !
Avec 50cm de long (hors axe ?) une base de 60cm comme mon exemple, est insuffisante.
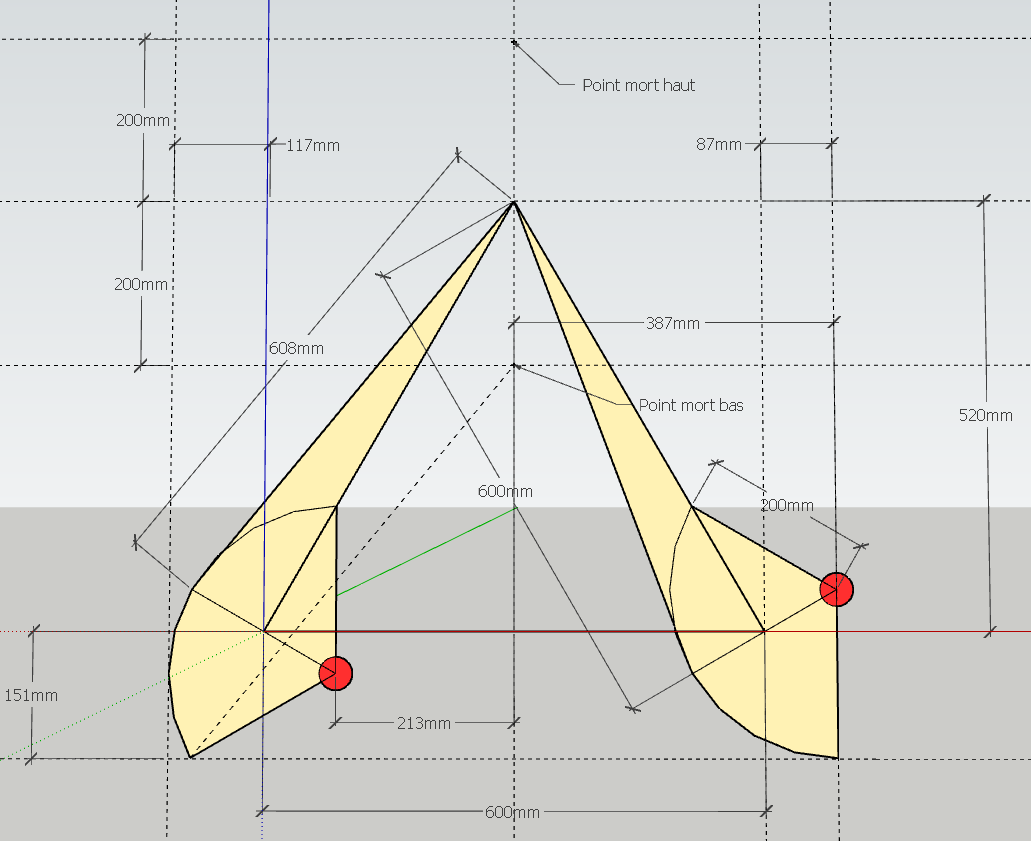
Voilà une rapide épure, le montage de gauche me semble plus approprié, mais les moteurs à l'intérieur du triangle ne disposeront pas de suffisamment de place.
Avec des manivelles de 200mm tu auras en vertical 400mm de course et en horizontal plus 500mm.
Interroge-moi sur cette image, à mon avis il est impératif que les manivelles soit ainsi au point neutre (milieu).
Si la rotation des manivelles est dans le même plan c'est plus facile et plus "mécanique".
Cependant tu peux faire pivoter les moteurs sur la rotule inférieure des bielles de cette position de départ pour les mettre à 60° les uns par rapport aux autres;
Mais fait attention à ce qu'au point neutre tu respecte scrupuleusement le triangle isocèle que j'ai dessiné à 600 de coté.
Note que les bielles font ici 608mm mais comme elle ne seront pas en haut sur le même axe 600 mmm seront parfaits.
Un montage avec ces dimensions te permettra (en théorie) de prendre +/- 30°... 



 ...
...