eh mais c'est idéal pour imprimer des gods ça ![]()
Messages de Etienne
-
-
Sype67 j'ai préparé ta commande, elle part demain. J'espère que ça va marcher parce que c'est vraiment bizarre ce qui t'arrives avec la carte de Leo Bodnar. Mais on va trouver il n'y a pas de raison.
Dans tous les cas ma carte sera plus adaptée pour gérer un capteur magnétique type AS5600 (je devrais en recevoir bientôt), et j'ai rajouté la gestion de ce type de capteur récemment (bien top du reste, le signal est super propre).
Par contre pour les capteurs de pression, ma carte ne gère que du 3.3V donc on vera si ça marche ( Pascal 71 avait testé et apparement pas de soucis, mais j'attend la confirmation de 2 autres personnes). Pour ta pédale récup, normalement si c'est un potar pas de soucis en 3.3V.
-

Je ne l'utilise pas encore car je n'ai pas pris le temps d'apprendre, mais je l'ai installé, donc oui je peux toujours regarder comment ça marche.
-
le lien que tu donnes c'est pas juste un gyroscope, il y a un accéléromètre avec, ce qui pourrait te donner effectivement des angles, avec un algorithme de fusion et à condition qu'il n'y ait pas d'accélérations parasites en plus, ce qui n"est pas le cas sur un 3dof.
Et quand bien même, la précision que tu aurais avec un tel capteur serait largement insuffisante pour faire un asservissement. Et vu le prix d'un capteur de position angulaire pour un vérin (3 € pour un AS5600 ), je ne vois vraiment pas l'intérêt d'une approche de ce style, qui de toute façon comme tu l'as compris ne peut pas marcher sur un 3dof puisqu'il faut aussi la position verticale.
-
Attention la joystick.h est compatible uniquement avec les arduino leonardo et nano : il faut un processeur ATmega32u4
Non le nano c'est un ATmega 328p...
-
un gyroscopes mesure les vitesses de rotation. Je ne vois pas ce que tu comptes faire avec ça.
-
Si c'est pour poster des vidéos de drogués qui appellent un aspirateur chinois "roomba from Amazon", tu peux retourner hiberner

-
Oui, ce sont des commutateurs rotatifs, ils ont des crans bien durs.
-
J'ai déjà vu un système qui utilisait un système de matrice pour les encodeurs, mais je ne suis pas convaincu, car il faut pouvoir attraper les impulsions à coup sûr pour ne pas rater des pas, et le système de matrice faisant un balayage, je pense qu'il y a un risque de rater des impulsions.
Je pense qu'il y a moyen de faire un système à base de résistances qui ne raterait pas d'impulsions, mais c'est encore de la R&D, pour des cas très rares (et franchement avoir 10 encodeurs sur un volant, c'est une peu abusé à mon avis).
-
Non les encodeurs rotatifs se câblent séparément (pour ce qui est des directions), c'est d'ailleurs le cas dans ta vidéo. Il y aurait peut être moyen de regrouper mais j'ai pas encore développé ça. Pour les boutons des encodeurs rotatifs, quand il y en a, ça se câble comme les autres boutons.
Le système de matrice fonctionne mais ça a des contraintes au niveau de la possibilité d'appuyer sur plusieurs boutons en même temps (ce qui peut être gênant pour les switchs non momentanés), et ça fait quand même un bon plat de spaghettis.
J'ai développé un système à base de résistances, le "Bodac" qui enlève toutes ces contraintes, simplifie le câblage et demande moins d'entrées que tous les autres systèmes : 1 entrée analogique pour 5 boutons, 2 fils qui partent de la carte si on soude la résistance commune directement sur la carte, ou 3 fils comme ci dessous (la résistance commune est celle qui part du fil rouge, à côté du dernier bouton à gauche). Le nombre de fils qui partent de la carte peut être encore réduit à 1 ou 2, car le GND peut être partagé sur tous les boutons :
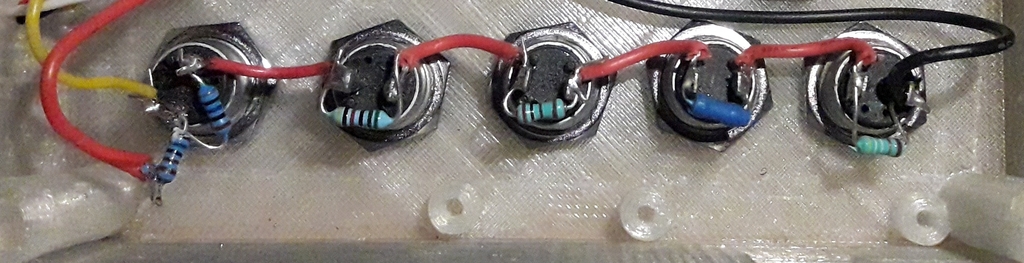
Les platines que j'ai fait pour les encodeurs incluent la possibilité de souder directement les résistances pour les boutons des encodeurs, et pour les boutons normaux il suffit de souder les résistances entre les bornes des boutons.
Au final, avec ce système, tu peux avoir énormément de boutons sur une petite carte, et le câblage est le plus simple et le plus aéré possible.
-
J'ai bien compris, c'est bien pour ça que je te donnes les informations, il ne faut pas le prendre comme une critique.
Cela dit, avoir un volant fonctionnel est plutôt vendeur... On pourra faire des échanges pour limiter les dépenses par exemple.
-
Avec mes cartes tu peux tout gérer d'un coup, tous les boutons, tous les encodeurs, l'écran et les leds, avec une seule carte et un seul USB. Pas besoin de sacrifier quoi que ce soit...
-

Une boîte en H avec ffb ? Tu peux préciser un peu ?
Je vois bien l'intérêt, mais comment ?
avec le bobard server, je récupère l'embrayage, et en fonction je peux empêcher le passage de vitesse ou faire craquer la boite. On peut même imaginer la configuration du nombre de rapports en fonction de la voiture, voir passer en mode séquentiel aussi automatiquement (mais ça suppose un ffb 2 axes, alors que le blocage ou le craquement ne demande qu'un axe)
-

Tu fais reconnaître un volant DIY comme un volant Fanatruc ?
Bravo c'est ça !
Ch4rL1E , non c'était l'inverse que je faisait déjà, utiliser un volant fanatec sur une base diy
-
Gestion des led et des vibrations avec sim hub

Non c'est pas ça, sinon il y aurait un module "SimHub Interface"
-
Les leds et l"écran tu ne les gères pas avec cette carte.
-
Je compte :
- 10 encodeurs rotatifs : 20 entrées (on va dire qu'ils n'ont pas de boutons, sinon ça fait 30)
- 2 commutateurs rotatifs au centre (on va dire que c'est ça et pas des encodeurs) : 2 entrés analogiques
- 10 boutons : 10 entrées (sauf si tu fait une matrice ou un réseau de résistances)
- 2 palettes : 2 entrées
- plus un switch qui a l'air d'avoir 2 positions en bas à droite : 2 entrées
- des leds : une sortie
- un écran (on vas dire Nextion) : 1 entrée + 1 sortie.
ça fait 39 broches... donc t'es loin du compte avec un Nano, sauf si tu fait une matrice ou des réseaux de résistances.
Mais de toute façon tu ne peux pas faire un périphérique de jeu avec un Arduino Nano.
-
La nouvelle version de la carte TBB_01 est enfin disponible !
Un circuit de charge en option permet d'alimenter la carte avec une batterie pour les applications embarquées.
Une référence de tension externe est également présente pour mesurer la tension de la batterie à l'aide d'une entrée analogique, ce qui permet de connaitre la charge restante.
Le reste des fonctions est toujours présent : gestion des écrans Nextion, des Leds RGB, des modules Hx711, de multiples entrées sorties numériques et analogiques.

-
Je ne vois pas le rapport entre l'embrayage et SimHub. Par contre si tu fait une boite en H à FFB comme ça me démange depuis un moment, effectivement la carte de gestion du pédalier, faite avec NodeBlue, peut envoyer l'info de l'embrayage à la carte qui gérerait le blocage ou les vibrations...
-