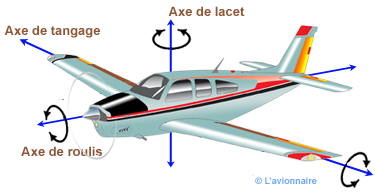
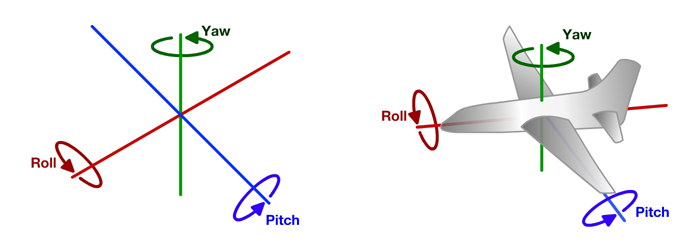
Quand je parlais de pitch, je parlais de l'angle du simulateur, quel que soit son origine (angle de la route et accélération longitudinale, voire verticale).
Le problème avec tous ces termes c'est qu'il n'ont pas de définition officielle dans le domaine des simulateurs, ce qui rend difficile les échanges sur ce sujet.
Dans tous les cas, le réglage d'un petit simulateur ça reste toujours un compromis. Et moins on a de dof plus il va falloir en faire. Sans parler des goûts personnels qui peuvent être très différents.