

Thanks Lexins! i will try that tonight, and report here ![]()
Messages de RoZ
-
-
hello guys,
J'ai reçu depuis un esc 4.12, le résultat est le meme.
Méthode effectuée sur 2 pc (win 7 et win 10) et sur 2 esc (4.2 et 4.12) toujours le même message au moment de charger le FW de carlton depuis vesctool : "The selected file name seems to be invalid".
Je peux donc le flasher QUE via ST-link, et une fois effectué, plus de communication usb.

Ton bug vient du fait qu'il charge les paramètres en EEPROM de ton ancien programme, et qu'ils sont incompatibles avec la version du firmware que j'ai réalisé, et comme la config est chargée avant l'USB, le vesc bug avant que tu puisses te connecter. Si tu regardes le code du main, tu verras l'ordre d'init des modules du VESC.
Que veux tu dire par "ton ancien programme" ? : le FW par defaut? je comprend pas cette phrase.
"Si tu regardes le code du main" : de quoi parle tu?
Merci,
-
Rafffel... Rafffel... tu traînais pas sur l'irc REPRAP?
-
Salut
 je viens de faire cette manip sans succès.
je viens de faire cette manip sans succès.Des qu'il lit le FW, il déco l'usb. (quand je clic sur "program verify." dans STlink exactement)
Mais en fait je viens de m'apercevoir que j'avais déjà fait cette manip.
C'était mon plan B quand Vesctool m'avais jeté pour charger ton FW, au moment ou je le charge j'ai ce message maintenant : "The selected file name seems to be invalid."
Avec les FW d'origine, ça fonctionne, on peut les charger.
Je ressaie demain, suis peut être passé à coté de quelque chose.
Merci encore pour tes explications.
")
Guillaume
-
Merci pour toutes ces informations et pour le temps que tu as pris pour répondre

C'est super intéressant tout ce que tu dit là, vraiment. je vais surement le relire plusieurs fois ce poste!
De mon coté ce WE j'ai flashé mon Vesc 4.2 , avec le client 2.0.3 et ça a dégagé le port usb.
j'ai pu le reflasher avec un FW par default via ST-link pour recup l'usb.
J'ai réessayé sans succès.
Comme je disais sur le sujet ou je fait mon volant, j'ai déjà commandé un vesc 4.12. ... je me suis dit qu'il y avait peut être un souci de compatibilité.
Au pire le 4.2 servira pour un skate elec, mais je peux le triturer pour lui faire avaler ce FW
D'après toi le fait que l'usb dégage est du au fait qu'il ne soit pas encore modifié ? (CàD les deux résistances de 1mOhm par des 5mOhm et les condensateurs )
ou on est sur un problème de compatibilité de version?
edit : ha si j'oubliais, je ne compte pas utiliser un MIGE comme moteur mais un Brushless comme ceci https://hexadrone.fr/gamme-gimbal-n…-kv-tmotor.html en version sans encodeur, et j'utilise un 2500ppr en direct. voila l'projet
-
Petite avancé du weekend, je sais maintenant comment briquer un Vesc 4.2
 ... le FW de Carlton, s'update bien mais je n'ai plus accès au port usb pour configurer le moteur et la batterie. Et même si je configure le moteur et la batterie avant, je n'ai aucune certitude que mes réglages soient encore en place après flashage.
... le FW de Carlton, s'update bien mais je n'ai plus accès au port usb pour configurer le moteur et la batterie. Et même si je configure le moteur et la batterie avant, je n'ai aucune certitude que mes réglages soient encore en place après flashage.J'ai remis un FW d’origine via ST-link, et je crois que ce VESC4.20 fera parti d'un autre projet, comme un skate électrique par ex.
J'ai donc commandé un Vesc4.12 qui à l'air d'accepter le FW de Carlton, cela dit, je ne sais toujours pas si ce FW est taillé pour son Mige15015 ou s'il peut s'adapter à ce projet... a priori le FW drive le PWN+DIR et d’autres utilisateurs s'en servent avec des moteurs d'hoverboard... donc je dirais que non...

Si vous avez des pistes je suis preneur, en attendant le vesc4.12, je continu le pédalier (bientôt fini!).
-
Bonjour à tous, j'aurais quelques questions concernant le setup du Vesc.
J'aimerais utiliser ton firmware Carlton, je possede un Vesc 4.20 comme celui-ci https://fr.aliexpress.com/item/400043882….27426c37IpR4D1
- Pense tu que je puisse flasher mon Vesc 4.2 avec ton firmware?
Car au moment de charger ton fichier.bin, j'ai un joli message qui me prévient que vais flasher un matériel qui n'est pas prévu pour le firmware et que cela peut endommager le Vesc ... et donc potentiellement ce qui est branché dessus.
-Après avoir parcouru tous les menus de vesc-tool, j'ai constaté que l'on peux sauvegarder les réglages du moteur/batterie et de l'app,
Le firmware que tu à développé est il spécialement paramétré pour ton mige ou est-il "adaptable" à d'autres moteur? ( càd puis-je utiliser ton FW avec mes réglages moteur?)
-Quel est la différence entre les deux .bin ? ( entre le default et le R005?)
Serais tu enclin à partager ton code de départ afin que je puisse (déjà comprendre le dialogue entre la discovery et le Vesc) et compiler un FW adapté à mon montage?
Merci pour ton travail en tout cas ! ... je précise que je ne compte pas en faire un bizness et que si tu decide de partager ton code ce sera avec grand plaisir de partager mon projet DIY des qu'il sera fonctionnel. DIY - Conception / Réalisation volant DD moteur Brushless / Vesc
-
Bonjour à tous, le projet avance tranquilou,
la partie mécanique est presque finie et j’attaque l’électronique non sans sueur froide ..

 ">
">j'ai recommandé un encodeur 2500ppr pour le mettre en direct du coup...
 ">
">une petite vidéo du montage à vide (sans alim)
(pour le "clic" des palettes, la gauche dispose de son capteur fin de course, la droite pas encore)
https://drive.google.com/file/d/1p8XBZp…iew?usp=sharing
Me "reste" à mettre au point la communication entre la discovery et le Vesc et c'est maintenant que je commence à galérer.
Je vais poser quelques questions à Carlton sur son sujet avec Mige et Vesc.
-
Waaa wow wow .... 85 euro les palettes les mecs !!!

ça fait 2 mois que je m’intéresse au milieu du simracing, et le moins qu'on puisse dire, c'est que les prix de certaines pièces sont délirants.
Pas envie de partir d'une plaque ? @ 25 euro t'as de quoi en faire pour les potes ou te faire un autre truc, et les aimants, t'en as 20 pour 13 euro.
Scie sauteuse, perceuse, colle, fini.
pour les "Clic", un morceau de scotch genre chatterton sur un des 2 aimants, ça devrait le faire non?
-
super ton pédalier, je suis sur le mien en ce moment, et je crois que je vais te piquer l'idée du moule pour les pédales, (trop bien) .. j'avais pensé le faire avec une bûche en bois et un autre "truc"
 mais ton astuce est top!
mais ton astuce est top! -
Super travail

-
Merci pour les infos "calcul"
non mais c'était un délire hier le x30

6000tr/min, c'est pour l'encodeur. il est capable de compter jusqu'a 6000tr/min, donc théoriquement , Moteur @200 tr/min x30 il calcule encore.
Là j'ai dessiné une roue cranté de 160 dents soit x10 . L'encodeur tournera donc au max à 2000tr/m. et si mes calcul sont bon, la résolution devrait etre de 0.036°
Pour ce qui est du jeu, effectivement, je met un point d'honneur pour que ce soit propre.
"Dis toi qu'il faut que l'électronique encaisse et au début ce sera plus simple pour debugger (voire rester en 1:1)"Comment je peux calculer ça ? , en effet, ça fait plusieurs jours que je me pose cette question.
Si j'ai bien compris, la personne qui a crée le Fw MMos a implanté comme réglage d'encodeur la valeur de 2500 en dur, c'est bien ça ?
Le fait de passer à 10000 doit tout dérégler non? (et créer les phénomènes cité dessus) - comment faite vous pour palier à ce problème? ... est on obligé de s’adapter mécaniquement pour retomber sur les valeur écrite ds le Fw ou peut-on voir ça plus tard dans un soft ?
-
Une petite coupe histoire de.
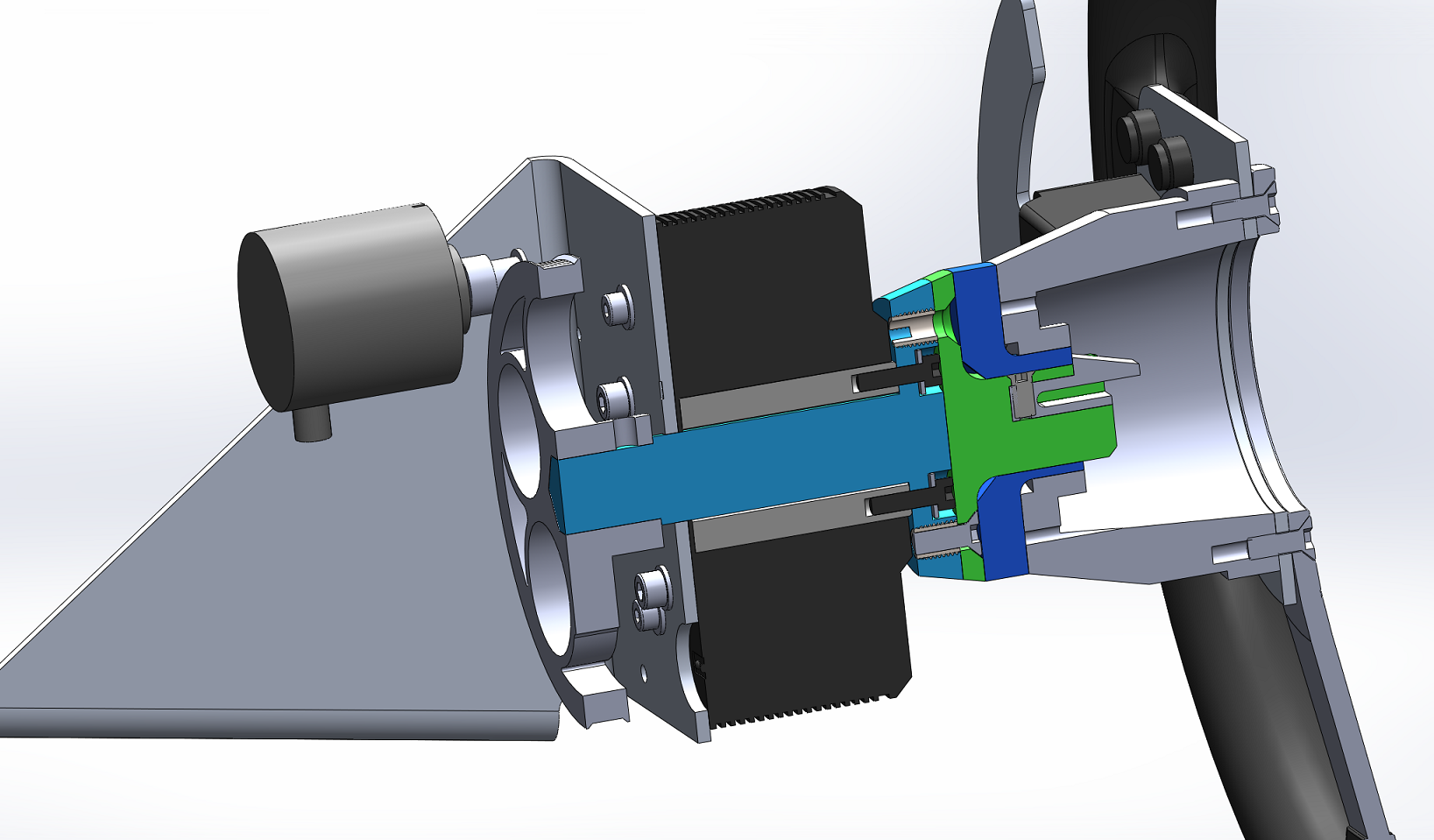
J'ai réussi à caser une roue dentée de 160 dents, qui ira avec sa poulie GT2 de 16 dents.
-
Merci loopingz, l'encodeur peux accepter jusqu’à 6000tr/min. ... Si je cale le moteur à 200tr/min (20V), théoriquement, je peux lui coller un fois 30 non? ! wouhou !!
J'ai cru comprendre que les personnes qui utilise un firmeware "fermé" (.hex) était obligé d'adapter leur démultiplication en fonction de leur encodeur, s'il le font pas, et qu'ils ne se retrouvent pas synchro avec ce que le firmware attend, ils se retrouvent avec des problèmes, comme des crissement dans le moteur, ou encore des blocages ou des sensations de "crantage" etc .. vous confirmez ce raisonnement?
Désolé si ces questions vous paraissent stupide, mais je découvre petit à petit les problématiques mécanique et électrique! (surtout) autour de tous ces elements à prendre en compte pour la conception.
-
Merci loopingz pour ta vison de la chose. Ce moteur est taillé pour générer du couple. C'est marqué sur la boite d’ailleurs
"high torque quelque chose" ...Sinon j'aurais une petite question, y'a t'il un intérêt de mettre un rapport de démultiplication sur l'encodeur? si je lui colle un fois 10 , cela changerait quelque chose?
Comme cet exemple : https://www.xsimulator.net/community/thre…or-wheel.14454/
L’échantillonnage étant plus fournis en terme d'information à traiter, cela rendrait le FFB plus précis?
(5 edit oui je sais , je vais y arriver
) -
ha oui c'est pas faux, c'est un 10KV/tr après tout
") ... wait & see, déjà le faire fonctionner , on verra l'optimisation après.
... wait & see, déjà le faire fonctionner , on verra l'optimisation après.J'ai lu un bon tier du sujet que tu m'as posté hier RacingMat, il parlait du couple qu'il obtenait sur son moteur d'overboard. il trouvait déjà ça assez sportif de jouer vers les 9-10 N/m. il l'avait booster @ 12 et obtenait des grincement. Et au final il est resté sur du 8-9 N/m afin d’être fiable; sans chauffe excessive.
-
Il me semble que les utilisateurs de MIGE recherchent une vitesse de 200-250 t/min , d'où ce choix. (ça fait environ 4 tours en 1 seconde quand meme!)
ça devrait aller pour les fibrations
-
Oui voila tu as bien compris ma vision des choses par rapport au choix du moteur. Effectivement, si on le compare aux 20 ou 30 N/m des MIGE, on peux penser que ça sera faiblard, (encore que, qui joue à 100% sur les MIGE? (y'a un sondage sur le fofo à ce sujet ?)). ... en fait ce sont les MIGE qui sont hors normes
Pour un premier volant, 7.7 N/m je trouvais ça pas si mal, effectivement on se rapproche d'un csw @ 8N/m qui me parait être une bonne base pour débuter... Vraiment si je le sent faiblard, via l'alim variable, je pourrais peut être le pousser un peu.
Moteur 24V _ 2.8-8.4A / Alim 0-30V _ 0-10A ... on verra bien, j'y suis pas encore
Merci pour les infos sur l'encodeur, je n'avais pas fait le rapport sur l'impact sur le FFB. j'vais méditer la dessus...
"L'objectif" au final c'est d'avoir une base DIY sur laquelle j'aurais la main. ... acheter un levier de frein à main à 130 euro, mhum.. non merci.
Je prefer le faire pour le prix d'une cellule.
Je l'avais pas précisé mais j'ai la chance d'avoir les plaques et les profilés alu gratos, et j'avais déjà plein de truc de coté (visserie, capteurs, ressorts, etc..)et a bien y regarder, il doit y en avoir pour quelques dizaines d'euro de plus.
Là j'en suis à environ 450 euro, et j'ai de quoi tout faire. (base volant, pédalier, levier de frein à main et un shifter) sans load cell.
Je verrais pour intégrer des load cell pour les freins (pedal et frein a main) plus tard. (chaque chose en son temp
)Et comme tu dit, la satisfaction d'avoir réalisé le projet sois meme , ça n'a pas de prix!
C'est aussi le message que j'aimerais transmettre aux gamins à travers ce projet.
-
Ouai, c'est vrai que j'ai déjà acheté pas mal de truc

Niveau budget, j'aimerais être dans les 500 euro le setup complet, j'ai pas encore fait les comptes de tout ce que j'ai acheté, mais je suis encore en dessous. Mais j'ai déjà tout en fait. (hormis les dernières commande qui arrivent .. alim Vesc et quelques trucs.)
Niveau électronique je comprend ce qu'on me dit
/ niveau programmation, on vas dire que j'arrive à flasher la RAMPS 1.4 de mon imprimante 3D, modifier un peu le code Marlin pour l'adapter à la machine, pour changer de pin par ex , mais je me sens pas développer un bloc complet.Mais idem, l'imprimante je l'avait faite alarach sans meme savoir avec quel firmware j'allais utiliser, et puis j'ai appris sur le tas.
Merci pour le lien, je l'avais pas vu celui-la.
-
Salut à tous, je suis en train de plancher sur un setup complet DIY, et j'aurais quelques question concernant le volant.
J'en suis encore à l'étape de conception, il me reste quelques composant à recevoir, d'autres à fabriquer, et je pourrais commencer à câbler/tester tout ça.
Niveau électronique, j'aimerais bien utiliser une léonardo ou une discovery, n'étant pas un cador en programmation, il me faut un firmware qu s'accordera avec le Vesc sans trop de modification de bourrin.
J'me suis procuré un moteur brushless comme celui-ci. Je compte le monter en DD.
https://www.alibaba.com/product-detail…0072432165.html
Le moteur est une version "beta", il ne comporte pas d'encodeur. (en cours de dev) .. donc c'est juste une cage, un rotor, du cuivre et 3 pins au cul.
en encodeur j'ai un E6B2CWZ6C OMRON 1000P/R
https://www.aliexpress.com/snapshot/0.htm…tId=32961497880
Apres discussion avec un pote fana de modélisme, ce dernier m'oriente vers un ESC pour piloter le moteur.
C'est en fouillant sur le net que je tombe sur le sujet de Carlton DIY - [MMOS + VESC] Création d'un firmware FFB pour VESC
et c'est ce meme esc que j'avais repéré compte tenu de son coté open source.
Ma premiere question: est-ce que cette configuration vous parait faisable? à t'elle un sens à vos yeux? (efficacité / simplicité de montage / sera joué par des enfants 11/13ans).
(perso je sais pas du tout ou je vais avec cette config
)J'imagine qu'avec le recul que vous avez dans le domaine, certaines choses vous paraissent bien ou aberrante sur ce projet, j'aimerais avoir votre avis s'il vous plait.
Ma deuxième question: concerne le rapport cogging/encodeur, je n'ai pas encore bien compris l'histoire du cogging par rapport au p/r. Plus on a de p/r, plus la précision est au rdv et le cogging moindre ??
le cogging n'est pas la résistance naturel du moteur? (vous savez, les accoups magnétiques lorsque l'on tourne le rotor à vide).
Ma dernière question concerne l'alimentation du Vesc. Rassurez moi, il peux fonctionner sur une alim 24V? (d’après mon pote oui) mais j'aime bien recouper
Vesc : https://fr.aliexpress.com/item/400043882….67ee6c377izz3n
Alim 24V /10A : https://fr.aliexpress.com/item/100500179….27426c37Sm6gUZ
Voila, excusez moi pour ce pavé d'introduction, mais comme vous l'avez constaté j'ai plein de questions .... et encore, je me suis pas trop lâché
Merci d'avance pour vos réponses,
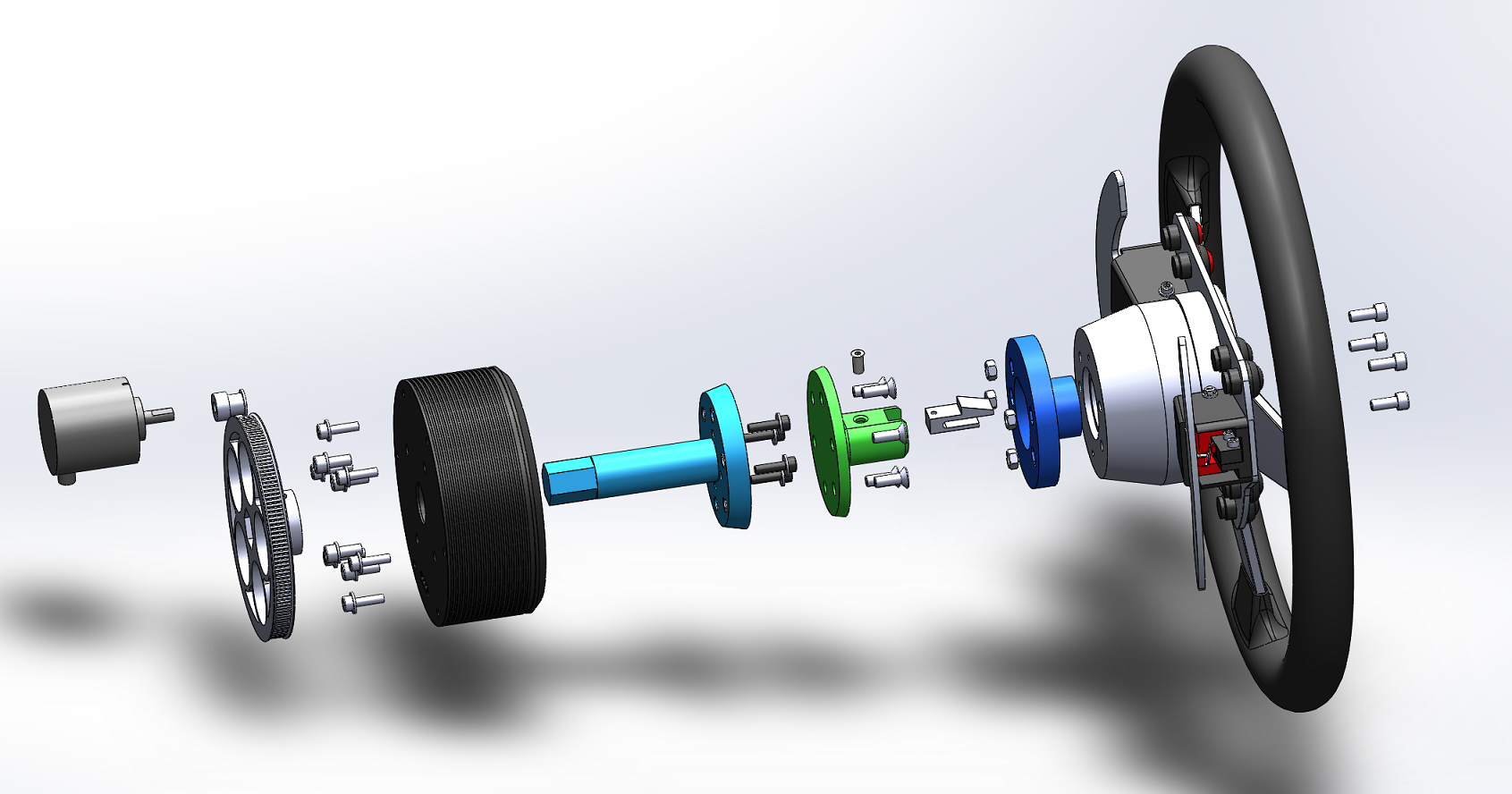
Aller, une petite photo de la CAO.