Hello,
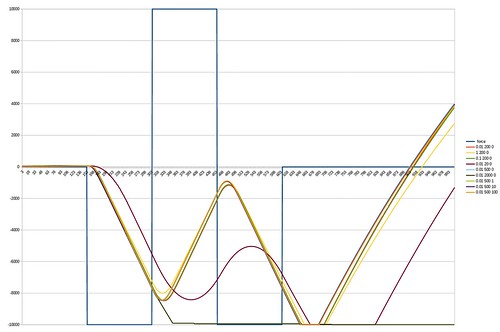
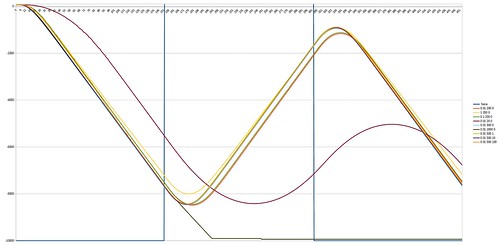
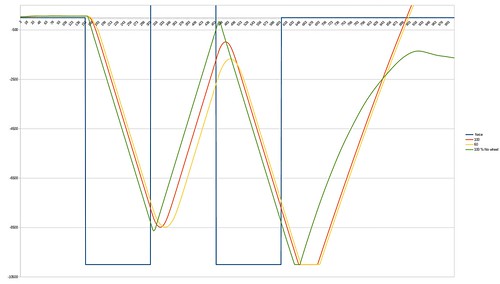
Je me suis planté pour les tests avec R005. J'avais roulé un peu avec la force à 60% comme je fais d'habitude et j'avais oublié de remettre à 100% pour les tests. Je les ai refait à 100%, le changement de résistance ne change absolument rien à la réactivité. D'ailleurs voici un petit comparatif 60%/100%/100% volant démonté (Restait juste le cylindre central monté en force)
J'ai arrêté mon choix sur 0.01 de KP, 800 de KI et 0 d'OG. J'ai roulé sur AMS2, ACC et BeamNG. Léger point négatif sur la très légère vibration constante qui ne peut être gommée qu'en baissant la réactivité, mais pour le reste, c'est du tout bon ![]() . Meilleure sensation de la charge sur les pneus, meilleure précision, des personnal best qui tombent avec une plus grande confiance dans la voiture.
. Meilleure sensation de la charge sur les pneus, meilleure précision, des personnal best qui tombent avec une plus grande confiance dans la voiture.
Je dirais que le changement de résistance n'est quand même pas pour tout le monde. J'ai bien galéré à virer celles d'origine ![]()
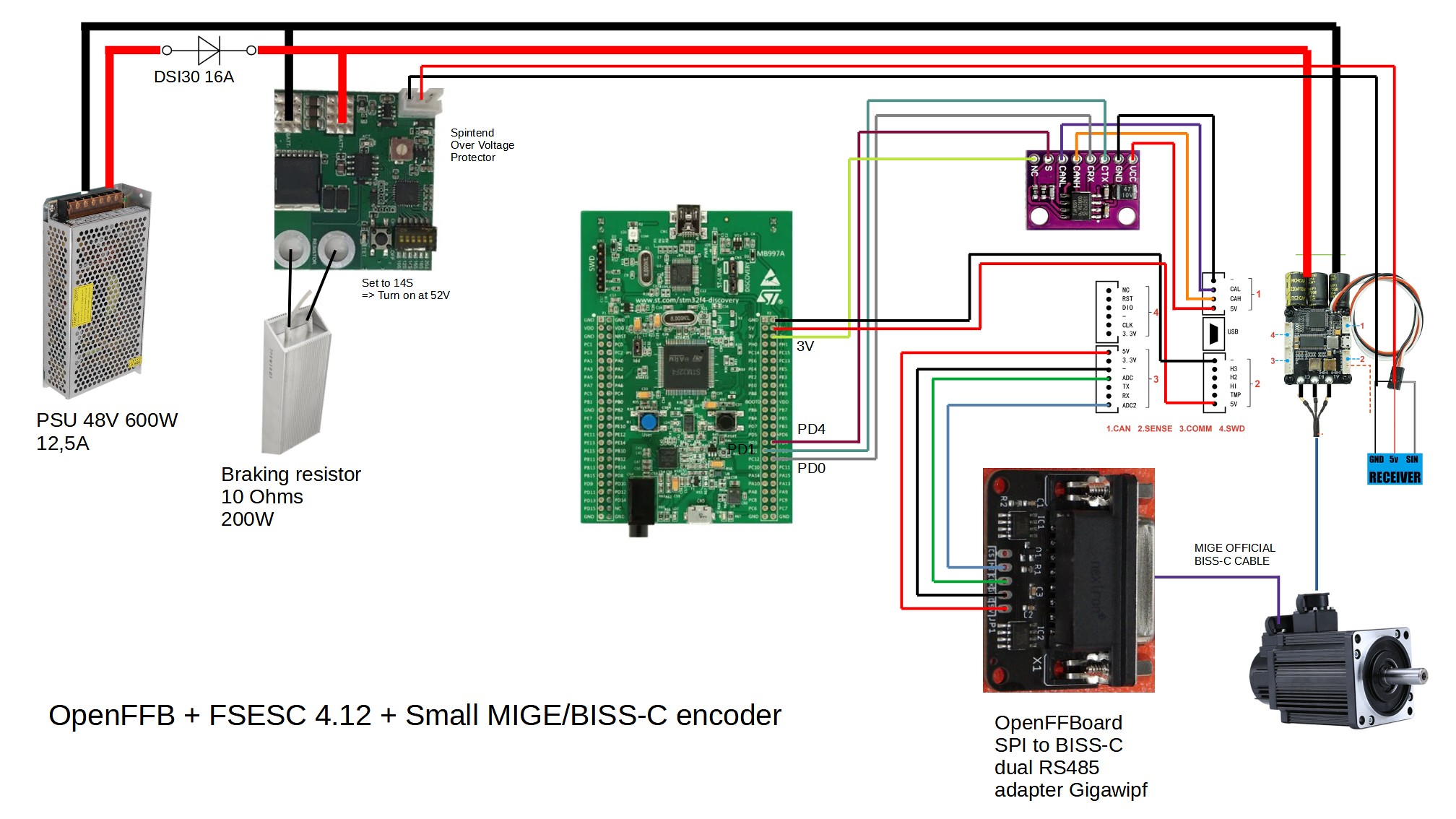
Petite réflexion que je me faisais: L'angle de l'encodeur passant par le CAN pour arriver sur la disco, garde-t-on la précision sur 22 bits? Et si non, serait-il intéressant de faire un split en sortie de l'adaptateur SPI/RS485 afin de faire également partir l'encodeur directement sur la disco pour améliorer l'application des filtres?
En tout cas merci pour ton aide et ta participation à l'implémentation de ces technos dans le firmware openFFB ![]()
Pour poursuivre l'analogie de mon premier post, le train est arrivé à destination. Bien content ![]()