


salut ! 
j'avais en tête plusieurs projets nécessitant un contrôle avec retour de force (FFB Force FeedBack) et pas simplement une commande en position :
- des palettes de gSeat pilotées en force et non pas pilotées en position comme le GS4.
Cela pour exercer la pression attendue malgré un déplacement du corps ou une corpulence différente entre les pilotes
- un manche à balai à retour de force pour simulateur avion
- une télécommande RC avec retour de force pour Pou du Ciel
Ainsi j'ai cogité sur les moyens possibles à mettre en oeuvre pour créer un petit système force-feedback :
j'ai identifié les options suivantes :
1- le même système que pour nos volant DIY RFR
un moteur en prise directe
un driver en courant pour moteurs brushless (VSD, Argon, IONI)
ou driver pour moteurs à balais (AMP, gecko...)
l'inconvénient : le coût ! plusieurs centaines d'euros
2- l'astuce de Etienne_Gameseed qui pilote le moteur en tension (alimentation en PWM) mais qui obtient quand même un pilotage équivalent en effort.
voir son projet de Volant FFB DIY Arduino
3- utiliser la pin de mesure de courant de la Motomonster (utilisée dans mon simulateur 2DOF) pour piloter le moteur
projet encore dans les cartons et restant à étudier !
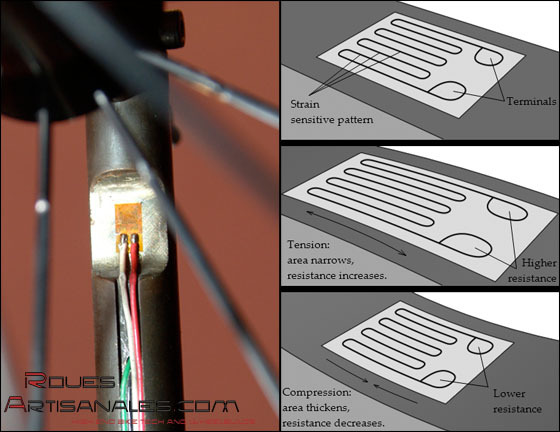
4- arduino + load-cell
car "Qui dit force, dit load-cell !" bien sûr 
une solution Arduino + load-cell avec la vidéo 
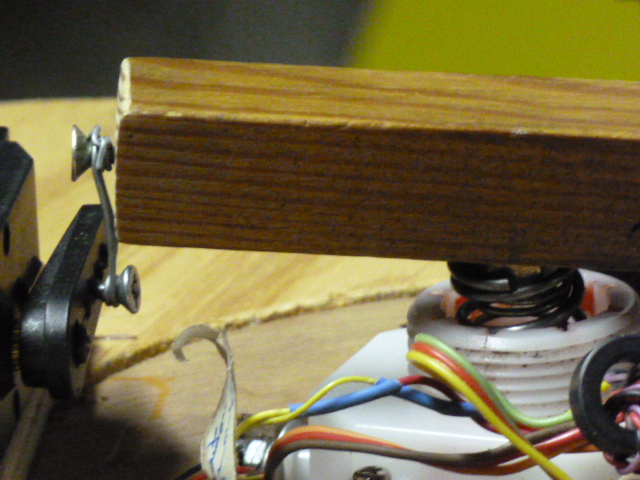
5- low-cost : arduino + 1 ressort + deux potentiomètres
ça vous intrigue ?










 Réduction à 89% de la taille originale [ 1124 x 721 ]
Réduction à 89% de la taille originale [ 1124 x 721 ]

