Bonjour a tous ,
Une petite présentation de mon simu auquel je viens de redonner un petit coup de jeune et d'ajouter la démultiplication des potentiomètres.
Rien d'exceptionnel j'avoues je n'ai fais que suivre les tutos de racingMath, wanegain, lipide 512...et d'autres.
Encore mille merci a eux !!!
J'ai commencé par réaliser mes plans en 3D sous cinéma 4D.

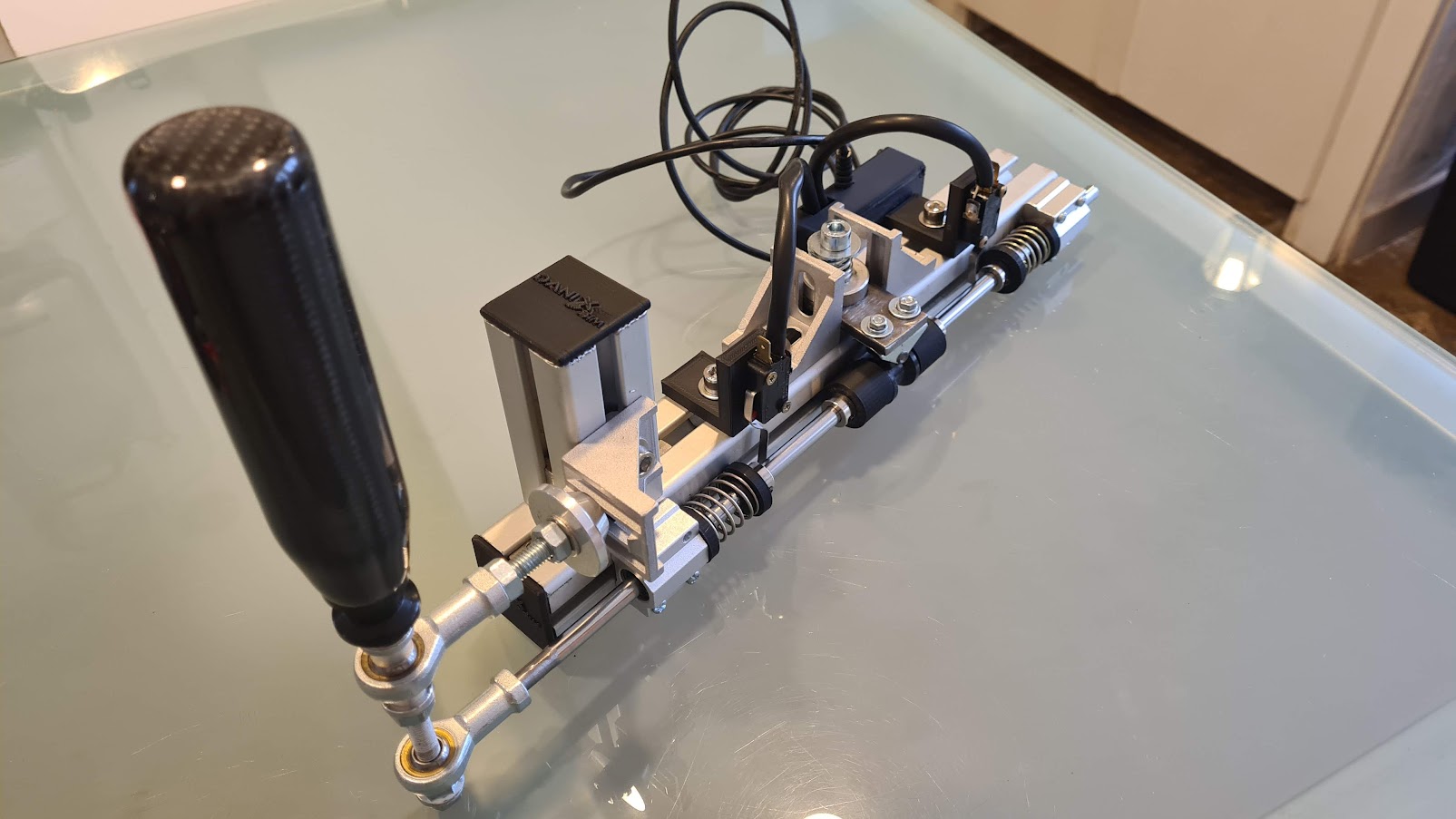
Réalisation du cardan qui va bien. (ou pas... on verra plus loin)

Tout est prêt a l'attaque !

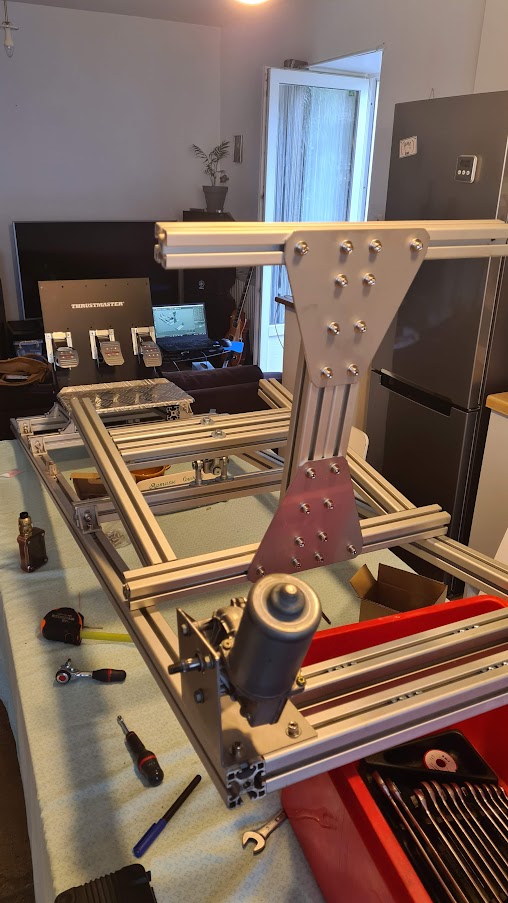
Les plaques de renfort et les supports moteurs ont été réalisé en inox.
J'ai ensuite modélisé et imprimé les pignons et leurs supports, le tout monté sur des roulements de roue de roller.


On continue avec la partie électricité


Malheureusement la rotule sous le siège permet trop de flexibilité et offre de la rotation très désagréable.
Problème résolu avec l'ajout d'une petite biellette.


Et voila !


Maintenant je reste confronté un petit problème il y a une petite différence de vitesse entre mes 2 moteur.
La carte moto monster a été remplacée, les potentiomètres ont été remplacé, et la masse des condensateurs a été supprimée.
Je suis également passé d'une alimention 30 a 50A mais le loup est toujours vivant....
Est ce que j'aurais touché un truc dans le code arduino involontairement ?
Moteur faiblard ? Pourtant ouvert et en bonne etat...
Je peux encore essayé d'inverser les 2 moteurs ou essayer un autre code arduino.
Merci de m'avoir lu @bientot !