


Du coup je vois que je n'ai pas été clair.
L'idée est de ne pas fixer le harnais sur la partie non fixe. On fixe le harnais sur la partie mobile, au pied du siège.
Il faut que les sangles remontent sur le dos du siège, pour passer dans les trous dédies dans un siège racing
Comme ça, le pilote s'arnache en montant dans le simulateur, et tend correctement ses sangles.
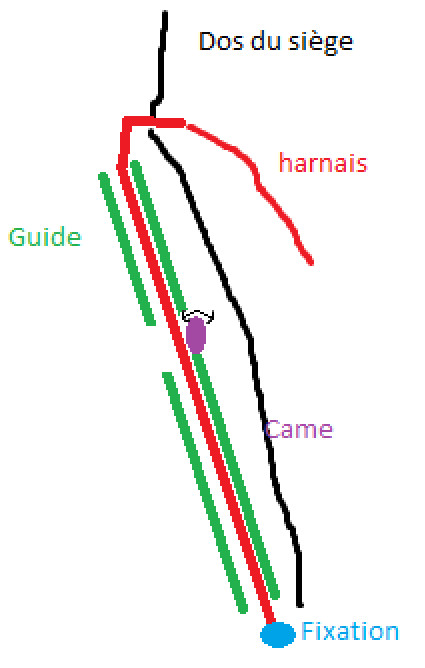
Ensuite, il faudrait que les sangles passent dans des rails, ou des tubes, afin qu'elles soient dirigées, et maintenues en terme d'écartement par rapport au dos du siège. A un moment donné, sur la hauteur du siège, il y aurait un espace dans ce tube, et c'est là qu'on positionnerait la came. Assez longue la came, pour créer suffisamment de tension. La rotation serait gérée indépendamment de tous les autres effets du simulateur, commandée par un servo dédié qui ferait uniquement tourner la came, et n'agirait sur rien d'autre. Simplement, on fait tourner la came pour tendre au moment du freinage, mais pas à la ré-accélération, ni quand le siège revient à l'horizontale, signe qu'il n'y a plus de "g" encaissés, donc plus aucune tension supplémentaire à appliquer au harnais, qui sera alors uniquement serré comme le pilote l'a fait au moment de s'installer.
Ci-dessous un très mauvais dessin fait sur Paint. Excusez mes piètres talents artistiques. Dans mon idée le guide et la came sont fixés au dos du siège pour plus d'efficacité. C'est la taille de la came et l'angle de rotation, de 0 à 90°, qui détermineront la tension supplémentaire appliquée au harnais.
Encore une fois, ce n'est qu'une idée ![]()
En fait, je simule le fait que quelqu'un tire sur le harnais par derrière pour le tendre un peu plus ....