Bonjour à tous ![]() ,
,
Heureux propriétaire d'un RFR Wheel depuis 8 années (Quelques anciens de ce forum doivent me connaitre), j'ai voulu lui redonner un petit coup de jeune en remplaçant l'encodeur d'origine 2500 PPR par un BISS-C.
Ma config complète:
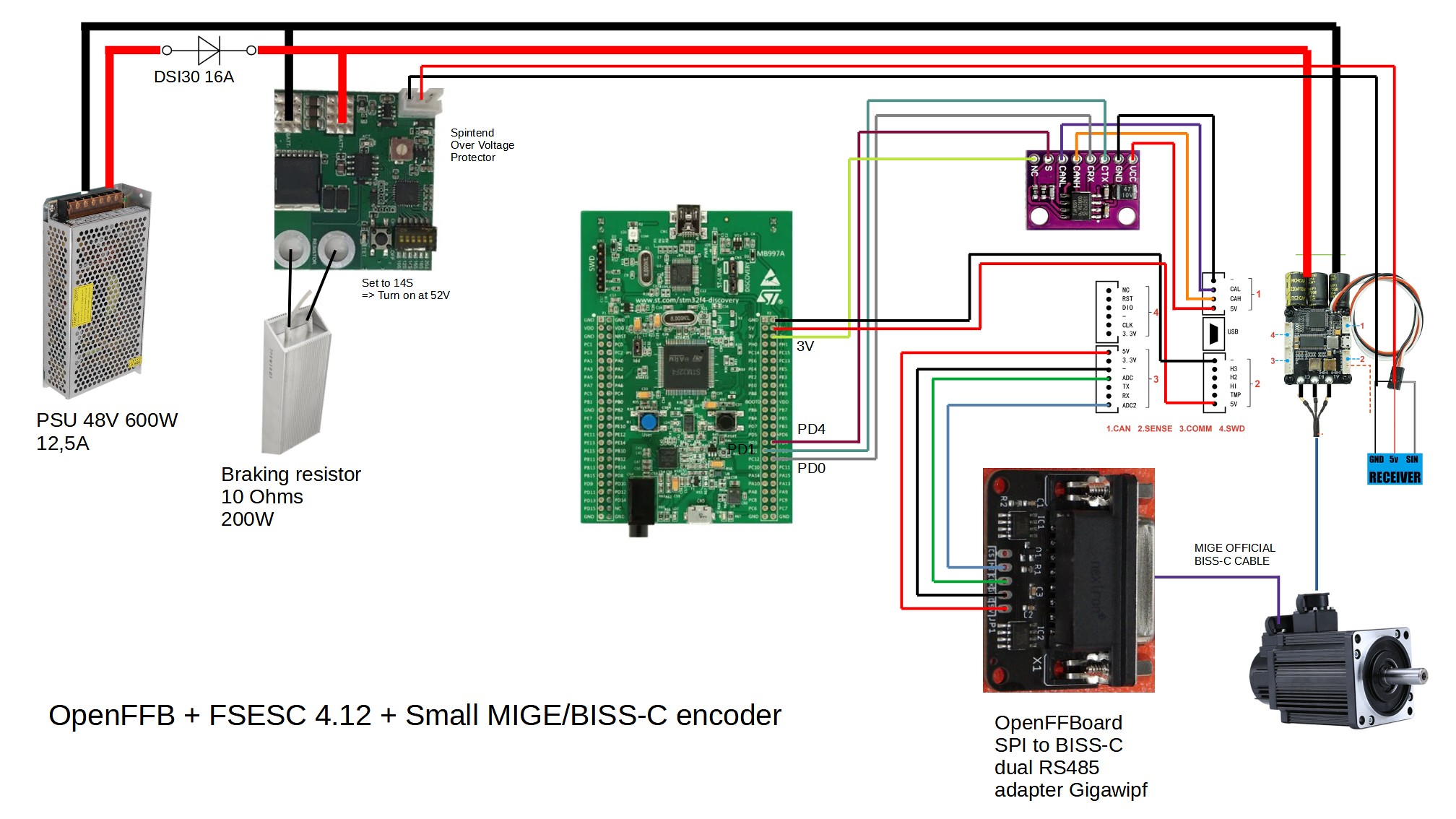
- Small MIGE 130ST-M10010
- STM32F407 disco avec OpenFFBoard
- Granite devices VSD-E
- Alim 48V
Enfin tout le bazar de cette vidéo finalement mis en boitier ![]()
Je précise que je bidouille mais je n'ai pas le niveau de connaissance des experts de ce forum. Donc ayant lu qu'OpenFFB supportait les encodeurs BISS-C, j'ai gentiment commandé un BISS-C sur l'Alibaba de MIGE (Pour info 55$ + 52$ de transport + 10€ de frais de douane) et dans la foulée l'adaptateur de Gigawipf. Je branche sur la disco et la lecture de l'encodeur fonctionne. Magnifique! ![]() Sauf que le FFB faisait n'importe quoi
Sauf que le FFB faisait n'importe quoi ![]() . Bon ben j'ai fini par comprendre pourquoi. L'ESC doit également connaitre l'angle du volant pour calculer la commande à appliquer au moteur
. Bon ben j'ai fini par comprendre pourquoi. L'ESC doit également connaitre l'angle du volant pour calculer la commande à appliquer au moteur ![]() et ma bonne vieille VSD-E n'est pas compatible avec les encodeurs BISS-C.
et ma bonne vieille VSD-E n'est pas compatible avec les encodeurs BISS-C.
Le train étant lancé, il faut désormais l’amener à destination. J'ai regardé les différentes possibilités et je pensais partir sur un VESC, surtout en ayant vu les travaux de Carlton (Merci à lui ![]() ). Par contre j'ai lu plusieurs galères sur des contrôleurs cramés, ports USB inopérants ou autres misères à cause de firmwares incompatibles et j'aimerais éviter de me planter. Des infos récupérées dans la config de la VSD, je sais qu'il me faudrait un VESC supportant 48V et 11A. Auriez-vous un modèle pas trop cher à me conseiller? J'ai vu que les prix pouvaient grimper à plusieurs centaines d'euros
). Par contre j'ai lu plusieurs galères sur des contrôleurs cramés, ports USB inopérants ou autres misères à cause de firmwares incompatibles et j'aimerais éviter de me planter. Des infos récupérées dans la config de la VSD, je sais qu'il me faudrait un VESC supportant 48V et 11A. Auriez-vous un modèle pas trop cher à me conseiller? J'ai vu que les prix pouvaient grimper à plusieurs centaines d'euros ![]()
Merci à ceux qui auront pris le temps de me lire ![]()