


j'ai l'impression qu'il ya pas grand monde sur le coup ...
J'imagine que les détenteurs de simulateur de mouvement sur ce forum sont en grande majorité utilisateur de OpenSFX donc...
Mais pour le coup FlyPT c'est tellement génial comme logiciel comparé à Simtools ! Franchement je suis bluffé !
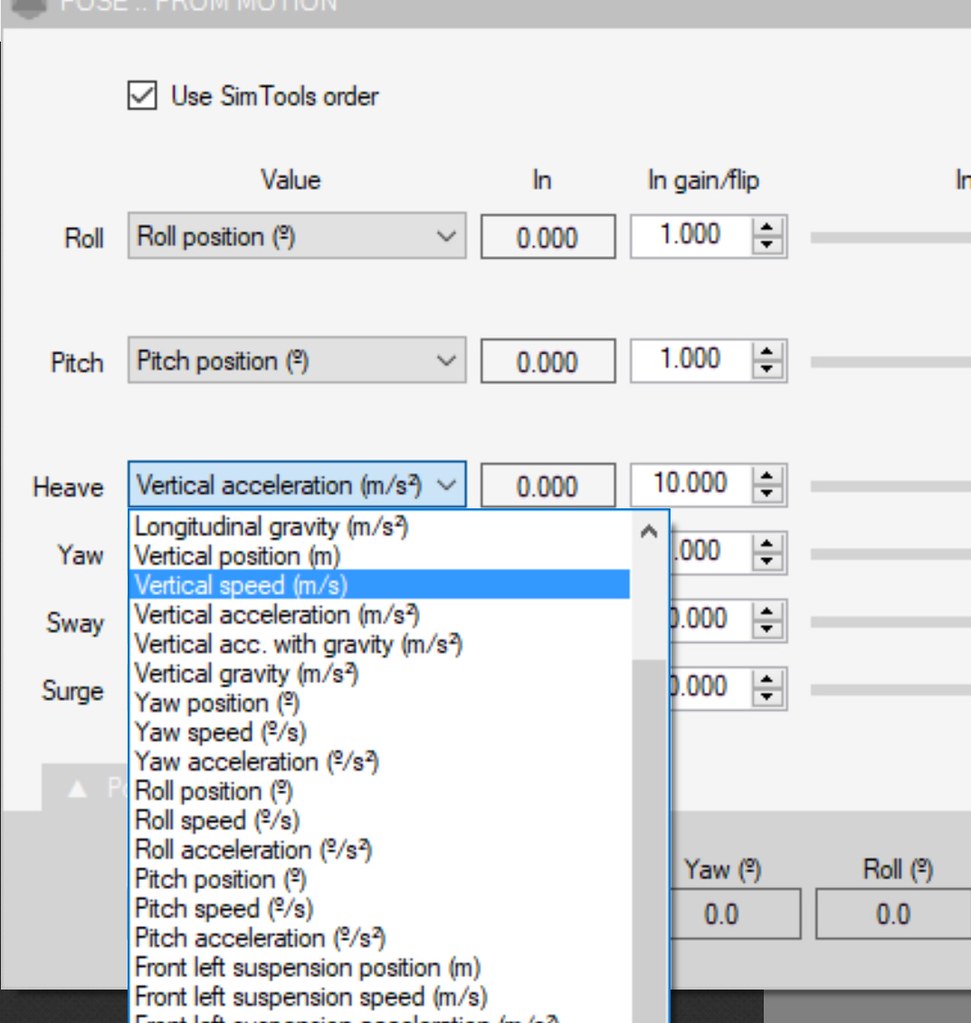
normalement il n'y a que le heave , l'effet vertical ? tu es sur que c'est pas ça ?
oui mais tu peux choisir quel effet tu rataches au heave. Je pense que le plus logique c'est d'y rattacher l'accélération verticale, mais pas sûr...
en même temps je fais les tests sur un pc portable qui galère même sur lfs. Et sur lfs le circuit de démo est plutôt plat donc ça n'aide pas à se rendre compte du rendu...
