
Sinon il y a les cartes pololu, protégé contre les surchauffes, sur courant etc... :
https://www.pololu.com/product/1451 : 12 A en continu, 30A en pic
https://www.pololu.com/product/2507 : la même en double, bridgable (24 A en continu et 60 A en pic)
Ces cartes sont top, j'ai pas mal fait joujou avec, jamais rien cramé, et en plus il y a un retour sur l'intensité du courant pour faire un asservissement en couple, et pilotable en PWM à 20 KHz..
Pilotage en couple donc on peut imaginer un espèce de retour de force ?
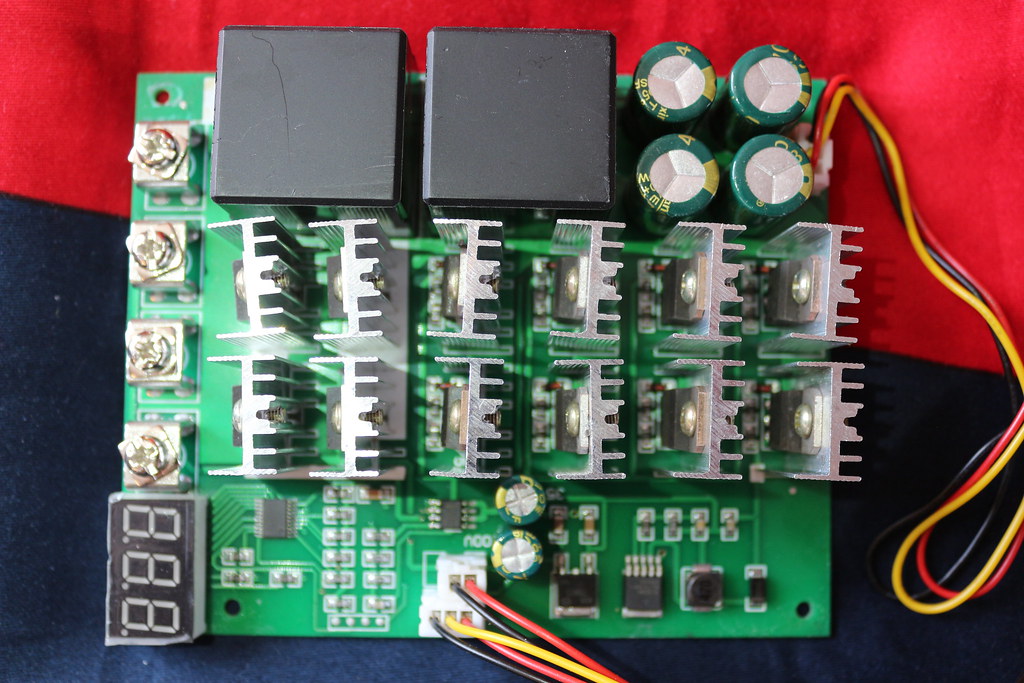
tu mets des radiateur pour tenir les 60A ? ![]()
![]()