

Cool ! Cette petite diffrence d'appréciation sur les LEGER crans hors tension etant réglé ![]()
Quel est ton retour Dude350z entre l'ancien SimuCube et le nouveau R9 ?

Cool ! Cette petite diffrence d'appréciation sur les LEGER crans hors tension etant réglé ![]()
Quel est ton retour Dude350z entre l'ancien SimuCube et le nouveau R9 ?
jmr31 : le ffb du R9 est excellent et me suffit amplement, je ne reviendrais pas en arrière ![]()
et c'est tellement pratique que la base soit si petite et légère !
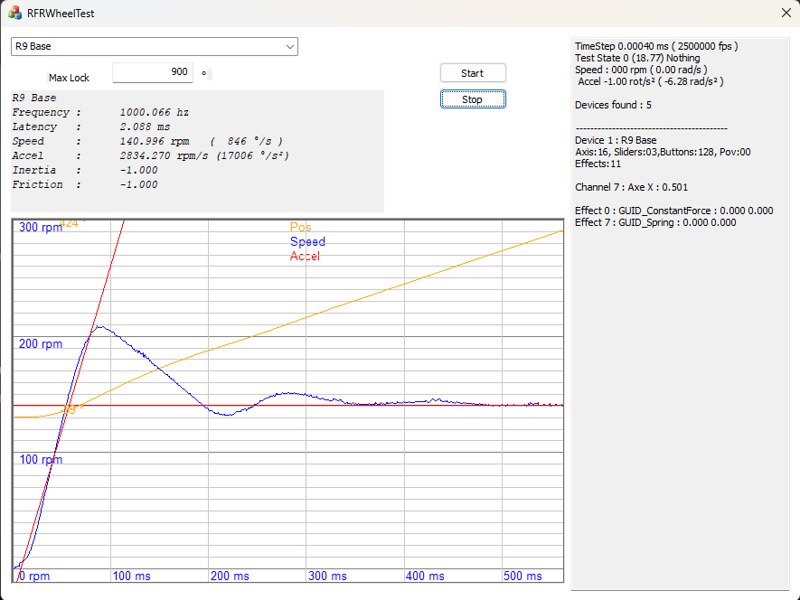
J'ai fait mumuse avec RFR Wheel Test, ma base R9 et mes différents volants. Enjoy ![]()
Momo Mod 78 sans hub (diamètre 32cm):
OMP avec avec hub et pushpull rallye (diamètre 32cm) :

OMP superquadro - hub avec double palettes (diamètre 32cm à méplat) :

Volant tulipé - hub type WRC (diamètre 35cm) :

Merci Dude350z
par contre un truc me chagrine, car les grandeurs ne collent pas (entre elles) sur toute la plage du relevé
En effet, les 3 grandeurs position, vitesse et acceleration sont liées par un opérateur mathématiques, en effet :
on dérive la position pour avoir la vitesse
on dérive la vitesse pour avoir l'accélération
ou bien dans l'autre sens :
si on intègre l'accélération on obtient la vitesse
si on intègre la vitesse on obtient la position
Il faut que je gratte pour comprendre ce qui cloche...
EDIT :
j'ai beau le retourner dans tous les sens, ça ne colle pas
dans le liens ci-dessous il y a un exemple d'accélération constante ou on voit bien les 3 ordres :
- constante (ou ordre 0) pour l'accélération,
- x (ou ordre 1) pour la vitesse,
- x² (ou ordre 2) pour la position
https://zims-lfr.kiwix.campusafrica.gos.orange.com/wikipedia_fr_a…9l%C3%A9r%C3%A9
Ou voilà dans le lien ci-dessous un autre exemple d'accélération positive :
contrairement à l'exemple précèdent, celui-ci commence par une vitesse initiale négative ET les trois courbes sont présentées dans l'ordre inverse :
- accélération (positive) en courbe du haut
- vitesse au milieu (vitesse négative au départ et qui crois de manière linéaire... en cohérence avec l'accélération du dessus)
- position courbe du bas en x² (elle décroît tant que la vitesse est négative... puis elle croit toujours en cohérence avec les courbes du dessus)
https://monde.ccdmd.qc.ca/ressource/?id=125116&demande=desc
En fait, je suis qqu'un de technique, donc c'est juste pour ma connaissance/curiosité (car je ne partirai pas sur du DIY par manque de temps et parce que les nouvelles solutions proposés depuis le CSL DD ne sont pas trop cheres ET suffisantes).
Comme les informations qu'on peut glaner sur les sites commerciaux ne me suffisent pas ou bien sont juste du Marketing à l'image des encodeurs à 4 Millions de points !!... J'ai décidé d'ouvrir ce sujet technique
Je pense qu'au delà de la discussion technique qui n'est pas inintéressante mais qui n'a finalement d'autre vocation que de comparer les technos utilisées dans les différents Direct Drive qu'on nous propose, c'est peut-être le titre du sujet qui est à revoir ![]() , ça fait un peu titre "putaclic à la Clubic"
, ça fait un peu titre "putaclic à la Clubic" ![]() .
.
Pour des constructeurs comme Logitech, Thrusmaster, et aujourd'hui Fanatec, il n'y a pas trop d'inquiétude à avoir par rapport à ces nouveaux arrivants. Nous, on est dans la "niche" du Simracing, donc on connaît ces nouveaux produits, mais le "grand-public" va d'abord faire confiance aux grandes marques que lui connaît (surtout Logitech et Thrusmaster, et ensuite Fanatec), en pensant à tort ou à raison qu'il aura ainsi moins de problèmes et de configuration à se taper. La technique n'intéresse malheureusement que peu de monde, le raisonnement prédominant c'est que si c'est beaucoup vendu c'est que ça doit être bien, et que si c'est bien vendu et cher c'est que ça doit être super ![]() (ou si c'est très très cher c'est que ça doit être vraiment au top... mais c'est pas pour moi
(ou si c'est très très cher c'est que ça doit être vraiment au top... mais c'est pas pour moi ![]() ) !!
) !!
Perso je préfère le DIY depuis qu'on a fait les premiers RFR-Wheel, j'ai quasi tout mon matos qui est monté par moi, ça simplifie le SAV, je sais à peu près comment tout fonctionne, comment améliorer sans attendre une mise-à-jour de ceci-cela, le matos me correspond, etc... mais c'est du temps que peu de monde veut passer (et vu comment je traîne à faire les chose, je les comprends ![]() ), et de l'autre côté faut pas sous-estimer le "bullshit marketing"
), et de l'autre côté faut pas sous-estimer le "bullshit marketing" ![]() , ça fonctionne très bien et les gens veulent toujours le dernier produit même si dans les faits il n'apporte rien de plus, ou peu, mais c'est le dernier (jusqu'au prochain
, ça fonctionne très bien et les gens veulent toujours le dernier produit même si dans les faits il n'apporte rien de plus, ou peu, mais c'est le dernier (jusqu'au prochain ![]() ! ).
! ).
Tortue G par contre quand tu va sorti ton DD il doit avoir au moins 50 kg de poussières dessus. Blague à part il y a une autre marque que personne parle est @Lokcy le maoul en est le proprio c'est Cammus. Je l'ai est contacter pour savoir le prix d'un bundle complet ,sa tourne avec fraie de port est tous le tralala a 1100e, mais on ne c'est pas de quoi est composer la base,si c'est du step by step ou pas
J'ai vu une vidéo ou un gars démontait une base Cammus
Les MOS de puissance qui drive les bobinages devaient être refroidit par une plaque conductrice (à travers un matelas thermique ou un pate conductrice...)
mais la plaque ne plaquait pas si j'ose dire => mauvais contact thermique => surchauffe des MOS avec risque de panne à la clef...
La qualité d'assemblage ne semblait pas très bonne... pour le reste c'est difficile a dire mais...
EDIT :
je viens de retrouver la vidéo...
Le radiateur n'est pas connecté à la semelle du MOS mais du coté de son boitier plastique => La résistance thermique doit être au moins 10x ou 20x plus forte... c'est pas top !
Etant donné que ce sont des MOS cms, il faut étudier le PCB avec de multiples plans (sur plusieurs couches, car les feuille de cuivre sont souvent en 35um) et éventuellement refroidir ces plans... et aussi s'assurer que les matelas thermiques soient en contacts (comme sur la video)
(sinon on voit 6 MOS de puissance, probablement pour faire 3 bras d'onduleurs... après on ne voit pas bien !)
Voilà c'est ce que je pense également, le titre ne colle pas trop avec le sujet , parce qu'il va en ressortir quoi ?
Que le meilleur moteur resteras le simucube ![]()
Ce n'est pas franconen qui avent testé le cammus.? Ça avait pas l'air folichon ....
En tout cas je suis bluffé par vos connaissances ![]() je lis avec plaisir même si j'en comprends pas grand chose
je lis avec plaisir même si j'en comprends pas grand chose ![]()
Quand je dis que ce forum est fantastique ![]()
Je bosse sur les volants et les bases, donc comme bases j'ai un Fanatec CSW 1.0, CSL, CSL DD, un Moza R9 et R21, un Simagic M10, un Thrustmaster T500 et T300, et des G25 et G27 (qui prennent la poussière), et aussi un DD DIY à base de "petit" Mige + FW que j'ai développé il y a un moment (j'ai donc pu comprendre et constater pas mal de choses). J'ai aussi testé un DD2, et le DD de Stef Bord à base de d'un moteur équivalent à un "Gros mige" (de marque HIRDEN).
Mes remarques, en vrac :
- Sur toutes les bases Direct Drive que j'ai pu tester (mais je n'ai pas pu mettre la main sur un SC2 pour l'instant), seul le DD de Stef Bord n'avait absolument aucun cogging (crans liés aux pôles). Je n'ai pas testé le "Gros" mige mais il semblerait que ça soit équivalent. Celles qui en ont le plus sont le CSL DD et le Moza R9, à un niveau équivalent. Sur ces 2 bases, une fois en marche le cogging est presque complètement compensé (mais au prix d'un damping permanent). Je dis bien presque, car malgré ce que j'ai lu, il reste présent même si en jeu on l'oublie.
- La réponse en courant d'une inductance à un échelon de tension est une exponentielle inversée (genre a.(1-exp(b.t)), pas une droite linéaire.
- La plage de valeur de l'axe sur DirectX est limité à 16 bits, donc effectivement monter au dessus n'apportera pas de précision en terme de positionnement, par contre plus l'encodeur est précis, moins il y aura de potentiellement de grains dans les effets qui mesurent et utilisent la vitesse de rotation (friction, damper et inertie par ex). Donc un encodeur 22 bits ce n'est pas que du marketing. Même si au delà d'une certaine précision à mon avis c'est impossible de sentir ou mesurer une différence, je pense que pour avoir des effets liés à la vitesse parfaits, il faut au moins 16 bits par tour (en dessous, on peut lisser avec un filtre mais ça donne un effet chewing gum). A savoir aussi que certains encodeurs sont optiques et n'ont donc aucune imprécision de mesure.
- A ma connaissance les seules bases qui ont utilisé des moteurs pas à pas sont les Accuforce et les Simagic M10. Et contrairement à ce que je pensais à priori, le ressenti n'est pas si mauvais que ça. Certes on sent un grain mais il est haute fréquence et d'intensité bien plus faible que le cogging des CSL DD ou Moza R9. Mais bon c'est une techno qui n'est plus utilisée, car même si elle permet d'avoir un rapport couple/prix plus intéressant qu'un brushless "classique", le cogging semble impossible à éliminer et de toute façon le prix des brushless a aussi baissé (et les gens ont l'air très content avec des CSL DD ou R9).
- Bien sur, au final la qualité du FFB délivré par le jeu va être important, mais si vous écoutez un enregistrement audio 24 bits à 192 KHz sur des écouteurs intra auriculaire bas de gamme (en bluetooth), y aura pas de miracle non plus ![]() (et même avec du haut de gamme ça ne reproduira jamais les basses comme un boomer de 30 cm).
(et même avec du haut de gamme ça ne reproduira jamais les basses comme un boomer de 30 cm).
- Je pense que quand on parle de qualité à propos des DD, il y a pas mal d'analogies à faire avec la HIFI. Plus on monte en qualité, plus on s'approche du moment ou les gains en qualité vont être faibles pour des écarts de prix de plus en plus importants (mais le gain sera quand même réel). Il y a aussi une part d'effet placebo et des gens qui n'ont absolument pas d'oreille et qui seront très content avec leur MP3 à 128 Kbits/s. Et puis il y a aussi plein de gens qui racontent n'importe quoi (y compris des "influenceurs" très gentils), mais ça c'est une autre histoire...
Bref je pense que Fanatec n'a aucun soucis à se faire, car la plupart des gens ne sentent pas le cogging, et ils ont une sacré longueur d'avance en terme de gamme de volants (roues). Au pire ils seront capables de se retourner rapidement en sortant une nouvelle base utilisant un moteur de meilleure qualité que le DD2. Bon il reste la question du QR, mais je ne vais pas remettre de l'huile sur le feu ![]()
T'es bien le premier que j'entends dire qu'il a du cogging en roulant sur un R9 ![]()
Oui mais bon toi tu dis qu'il disparaît complètement une fois la base allumée, donc c'est cohérent ![]()
Bah ouais moi quand il travail j'en ai pas ![]() Après au repos effectivement j'ai fais la méthode de Belphegor au petit doigt et on le sent
Après au repos effectivement j'ai fais la méthode de Belphegor au petit doigt et on le sent ![]()
Quand tu es en ligne droite, c'est équivalent à ce que tu appelle "au repos", il n'y a pas de couple dans le volant. Théoriquement tu peux le lâcher et il va rester au centre. Bien sur dès que tu va le tourner le couple va se développer et masquer le cogging, mais pour moi même s'il est faible par rapport au couple généré (et donc presque imperceptible et pas gênant), il reste présent. Tu va dire que je pinaille, et tu aura raison...
Oui c'est ce que j’appel au repos ![]() Après moi le cogging m’intéresses surtout en roulant, donc c'est vrai qu'en lâchant le volant en ligne droite ou au petit doigt j'ai pas particulièrement noté
Après moi le cogging m’intéresses surtout en roulant, donc c'est vrai qu'en lâchant le volant en ligne droite ou au petit doigt j'ai pas particulièrement noté ![]()
T'as raison de pinailler c'est le but de la discussions ![]()
Perso je test surtout le cogging là ou il me gène le plus si j'en ai sur un volant/base, les gros appuis, typiquement le raidillon de spa ou le droite de Kyalami . Ça m'avait dérangé avec le CSL DD parce que là je le sentais un peut pour le coup, même si c'était léger j'avoue que ça me gênais, mais pareil je pinaille pour le coup parce que du reste c'était pas gênant le reste du temps on le sentait pas. Pour le coup avec le R9 j'en sent aucun à ces endroit là, d’où ce que je dis plus haut ![]()
moi j'aime bien quand on parle Teche-nique... ![]()
Etienne Merci pour ces précisions.
Sinon, que penses tu (brièvement) du Moza R21 ?
Je n'ai pas testé vraiment en jeu, je l'ai juste sorti pour tester justement le cogging. Et il m'a semblé presque imperceptible, inferieur au Fanatec DD2 par ex.
Pour moi la qualité est supérieure au DD2, et en plus il y a un vrai QR avec aucun jeu, et bien moins cher quand il s'agit de mettre des roue DIY où d'autres marques...
Le design, on aime ou on aime pas mais faut reconnaître l'effort par rapport à tous les autres qui sont soit des boites, soit carrément moches (asetek par ex n'est pas du tout à mon goût). Mais c'est le critère qui passe en dernier selon moi.
Merci Etienne
J'hésite entre l'Alpha Ultimate et celui-ci, je partais sur l'Ultimate.... Donc là, en gros, tu ne m'aide pô...!! ![]()
Pour le design, c'est la même pour moi, ça passe après.... ![]()
C'est vrai que j'aime beaucoup aussi le design du R21 ça change de nos boites noire habituelles ![]()

- La réponse en courant d'une inductance à un échelon de tension est une exponentielle inversée (genre a.(1-exp(b.t)), pas une droite linéaire.
Bonjour Etienne
Non, la forme du courant dans une inductance soumis à un échelon de tension est une droite parfaitement linéaire (jusqu'à la saturation)
elle est donné par la formule suivante :

(Au limite, la forme du courant peut changer si l'inductance sature mais c'est un cas particulier (car si le noyau sature, la valeur de l'inductance chute => le courant peur croitre de façon exponentielle jusqu'à ce que la résistance série limite MAIS c'est un cas particulier)
La forme que tu donne "exponentielle inversée" est la forme de la tension d'un condensateur chargé à travers un résistance et une source de tension
Tu peux me faire confiance sur ce point car c'est mon domaine (l'électronique de puissance) et je l'ai enseigné ![]()
- La plage de valeur de l'axe sur DirectX est limité à 16 bits, donc effectivement monter au dessus n'apportera pas de précision en terme de positionnement, par contre plus l'encodeur est précis, moins il y aura de potentiellement de grains dans les effets qui mesurent et utilisent la vitesse de rotation (friction, damper et inertie par ex). Donc un encodeur 22 bits ce n'est pas que du marketing. Même si au delà d'une certaine précision à mon avis c'est impossible de sentir ou mesurer une différence, je pense que pour avoir des effets liés à la vitesse parfaits, il faut au moins 16 bits par tour (en dessous, on peut lisser avec un filtre mais ça donne un effet chewing gum). A savoir aussi que certains encodeurs sont optiques et n'ont donc aucune imprécision de mesure.
Si Windows ou DirectX limite la consigne à 16 bits, cela donne déjà une très brande précision ! (je ne pense pas que le jeu soit aussi précis que 0.0005° près)
Evidement dans un asservissement on peut avoir localement une valeur plus précise que le besoin réel car les erreurs s'ajoute et si on veut les diminuer... ou avoir un fonctionnement sans grain comme tu dis.
Mais un grain de 0.0005° (ou 16 bits par tour) correspond à un angle quasi nul !!! (voir l'angle de 1° en première page du sujet... il faut le diviser par 2000 pour avoir 0.0005°)
Alors quand il s'agit de 22 bits pour réduire cet angle à 0.0000085 (correspondant a 4 Millions de pas par tour !) je suis certain que c'est bien au-delà de ce que la base est capable de faire !!
Quelqu'un a dit : "qui peut le plus... peut le moins !" c'est vrai ! mais présenter cette valeur comme une précision est une erreur (car cette précision n'est pas tenable !) et ça c'est du Marketing (ou du mensonge)