

A top
Tu les as acheté ou et à quel prix? stp
tu en es contant?

A top
Tu les as acheté ou et à quel prix? stp
tu en es contant?
ou cela:
Support Anti vibratoire, , "support SEFZ SYL"
Le lien de vente:
https://www.solutions-elastomeres.com/fr/paulstra-su…s-sefz-syl.html

freps25 Tu trouveras pas mal de détails ici, j'ai fait un article sur mon blog avec le prix et le modèle que j'ai utilisé : https://djustou.wordpress.com/2021/11/14/ame…hassis-sfx-100/

freps25 Tu trouveras pas mal de détails ici, j'ai fait un article sur mon blog avec le prix et le modèle que j'ai utilisé : https://djustou.wordpress.com/2021/11/14/ame…hassis-sfx-100/
Merci top ![]()
Quel est l'intérêt, votre motivation d'utiliser ces pieds antivibrations?

Quel est l'intérêt votre motivation d'utiliser ces pieds antivibrations?
Salut
je me disais afin de stabiliser le simu au sol (avec la version bridable au sol) pour pas que le simu se ballade trop au sol
Hello les copains
Aujourd'hui réception du module capteur "Inclinomètre à vibrations 9 axes WT901C-232" pour le motion compensation (module recommandé pour le bon fonctionnement avec Sim racing Studio
Je pense le placer sur le châssis au niveau de mon Simucube 2.
Des personnes parmi vous qui on déjà installé cette appareil ?

Pour ma part j'ai un chassis traction loss sous mes SFX, j'ai monter les silent bloc eluflex( environs 120€ les 4) et depuis plus de problème! (avant mon châssis avais sauter hors du châssis traction loss heureusement j'ai rien péter)
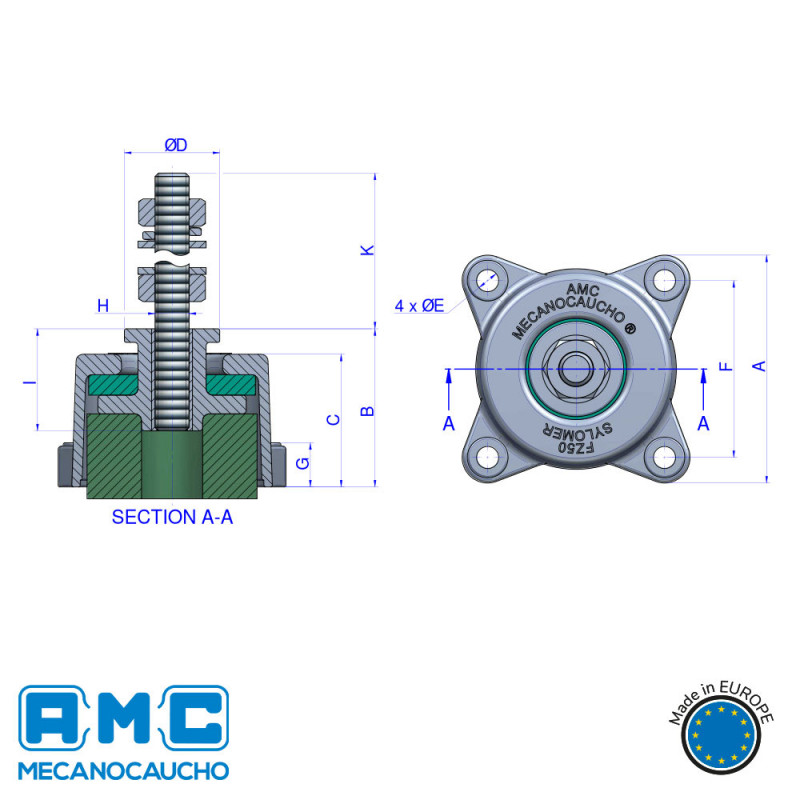
Salut, petites questions : est-ce que quelqu'un peut me donner le diamètre de la tige et la hauteur au repos, et la hauteur du "bloc" de 100x100mm(pas grave si il y a des variations de section comme sur un SCN6 en haut, c'est juste la hauteur totale qu'il me faut. En gros c'est juste pour modéliser le volume du cylindre et du carré ![]()

Salut, petites questions : est-ce que quelqu'un peut me donner le diamètre de la tige et la hauteur au repos, et la hauteur du "bloc" de 100x100mm(pas grave si il y a des variations de section comme sur un SCN6 en haut, c'est juste la hauteur totale qu'il me faut. En gros c'est juste pour modéliser le volume du cylindre et du carré
Si c'est pour modéliser alors tu peux récupérer le fichier .step du profil Alu sur le site de Kinetik, puis récupérer tous les fichiers imprimable qui constitue l'actuateur.
Profil Alu:
https://kinetikmsystem.de/profilsystem/a…mber=H950N1010z
Fichiers .stl des différentes pièces :
https://opensfx.com/downloads/
Te manquera juste quelques autres pièces pour finaliser comme la vis à bille ou de la visserie mais un tour sur traceparts et le tour est joué.
En gros tu n'auras que de l'assemblage à faire sous ton logiciel de CAD ![]()
Questions les gens : est-ce que sur des sessions longues, vos moteurs deviennent chauds ?
Je suis en train de réfléchir à faire des vérins avec servos moteurs sur des profilés 8080. Et du coup je passerai bien des 90st aux 80st.
Actuellement les 90st sont à 350€ livrés, contre 250€ pour les 80st...
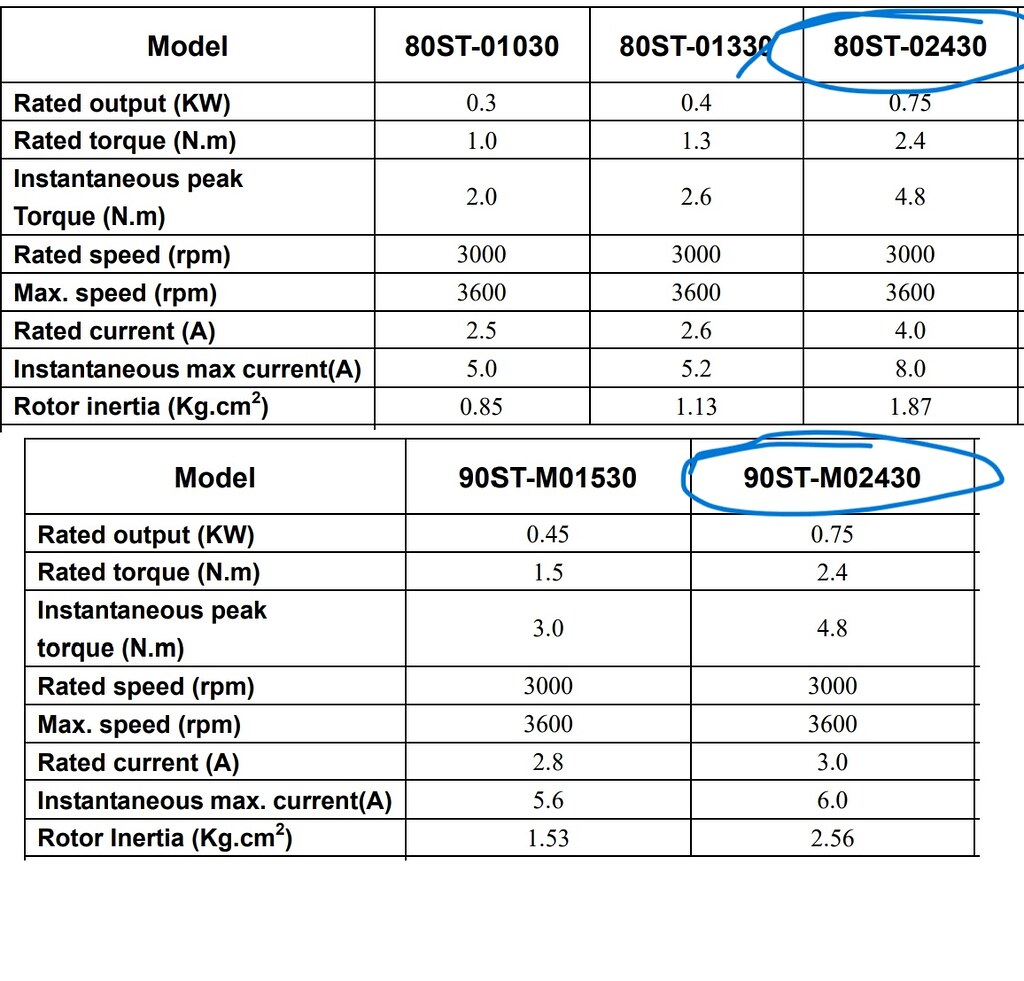
c'est les même à part le courant nominal ?
j'aurais tendance à dire que si tu veux que ça chauffe moins, il faut plus de puissance , passer par exemple à 1k plutôt que 0.75.
les experts des moteurs vont te donner la bonne solution ![]()
si tu veux qu'une machine force moins, il faut qu'elle soit plus puissante .
oui
mais à puissance égale, le modèle qui est à 3A va moins chauffer que le modèle à 4A
et pas seulement de 75%
car l'effet Joule = Rxi², il sera à 56% de chaleur produite.
PS : par contre, il faut qu'ils soient alimentés avec une tension plus haute
P = UxI
ouai donc ça risque de commencer à chauffer fort...
J'ai un 80st-m04025... Il faudrait que je le fasse cohabiter avec mes vérins actuels pour le tester longtemps...
 Afficher plus
Afficher plusoui
mais à puissance égale, le modèle qui est à 3A va moins chauffer que le modèle à 4A
et pas seulement de 75%
car l'effet Joule = Rxi², il sera à 56% de chaleur produite.
PS : par contre, il faut qu'ils soient alimentés avec une tension plus haute
P = UxI
il a plus d'inertie , on n'est pas sur de l'argument commercial ?
avec mes 5X90stm4025 et des vis à bille au pas de 10 , j'ai une consommation total maxi de 400W pour une charge totale d'environ 260kg toutes simulations confondues. ce qui fait à peine 10% (en arrondissant large)de la capacité des moteurs . les moteurs sont à peine tièdes après de longues cessions hard.
en ce qui concerne le choix des moteurs , le 90stm4025 a un meilleur rendement ( 4A/4Nm) alors que le 80stm4025 c'est( 4.4A/4Nm).
au pire faudrait que j'achète un 80st-02430 pour tester ... Je me dis aussi qu'en passant des 100100 en 90st à 8080 en 80st on gagne aussi en poids
Pour ce qui est de l’inertie du rotor, ce n’est pas qu’un argument commercial. Elle a de l’importance pour le dimensionnement de l’unité mobile.
Je ne suis pas un expert, certains pourront peut-être préciser, mais dans le dimensionnement d’un axe, il est préférable d’avoir un certain équilibre entre la charge à déplacer et la masse inertielle que peut posséder le rotor à travers la réduction. C’est ce qui est appelé le rapport d’inertie.
Si l’inertie du rotor est trop importante, la consommation énergétique pour mettre le moteur en mouvement (ou l’arrêter si injection de courant) sera importante (trop) au regard de l’énergie consommée pour mettre la charge en mouvement. Par contre le contrôle des mouvements de la charge seront plus faciles pour coller à la consigne.
Si l’inertie de la charge (à travers la réduction) est trop importante au regard de l’inertie au rotor, le moteur peinera à contrôler la charge et le contrôle du mouvement sera plus difficile à mettre en place pour coller à la consigne.
De ce que je me rappelle concernant le rapport d’inertie, il y a des limites théoriques (empiriques ?) pour que le système soit équilibré, ou à peu près équilibré.
Hello les copains ![]()
J'ai reçu quelques pièces en alu pour mes vérins sfx 150 ![]()
![]()
![]()
Il me manque 4 pièces (une par vérin) il me les fait d'ici une semaine
J'ai donc commencé le montage pwaaa c'est top, trop heureux





A plus les amis pour la suite
Salut à tous bon jv bientôt recevoir la première commande j ai hâte j ai commencé à imprimer mes sa me plait pas trop freps25 sa ta couté combien de faire sa en alu car jv peut être devoir faire rectifier les pièces en aluminium que j ai acheter