


Il faut aller sur le firmware 's guide, sur le site de Granity. Tout y est expliqué.
ok merci !!! ![]()

Il faut aller sur le firmware 's guide, sur le site de Granity. Tout y est expliqué.
ok merci !!! ![]()
Ca bloque à la fin
en fait ça marche pas ?
ça donne pas trop envie de s'y mettre ... c'est quoi le soucis ?
Tu es sur d'avoir bien chargé le dernier update ? De mémoire, c'est le 812.
Oui oui sur. J'avais déjà ça avec les versions précédentes ....
Je vais réessayer dans la journée. Je ne crois pas aux miracles mais sait on jamais ....
vulbas étrange ton soucis.
Poste ton soucis sur le forum granite, en général mika ou un autre "pro" te répondra rapidement
Passage à la bêta en cours...
Ok, si on n'a plus de nouvelles de toi, on appelle la police ![]() ?
?
Je l'ai fait il y 2mois,et je suis toujours vivant et un peu plus heureux en tant que sim-racer !
Etant donné que j'ai enfin commencé à m'occuper sérieusement du réglage du DD, bosser sur MMOS me parais un peu hasbeen.
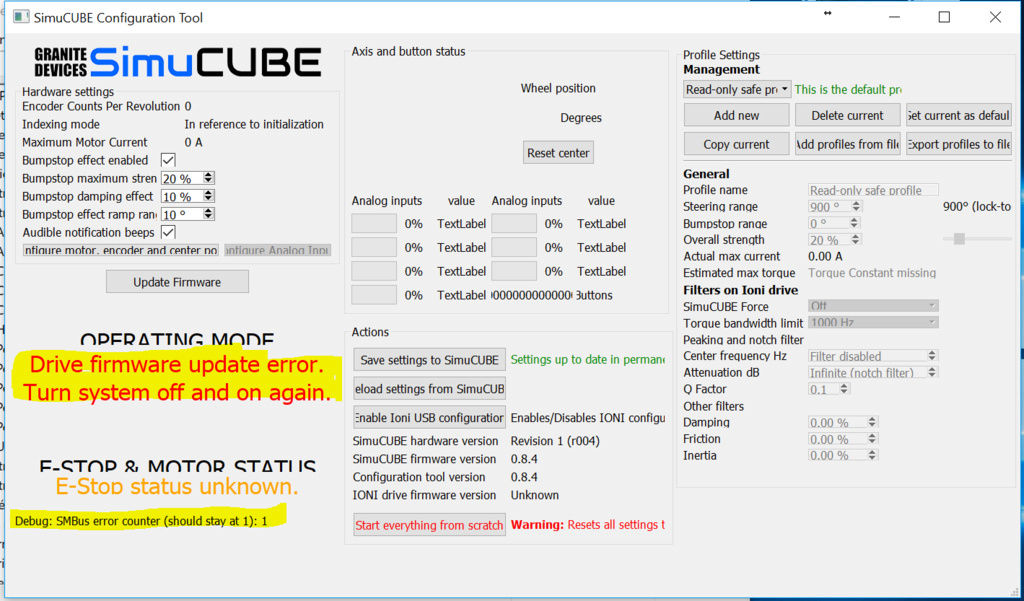
MAIS après avoir terminé l'install', je ne trouve plus la IONI quand je veux me connecté via Granity !!
La fenêtre connect Device est vide ![]()
As tu bien coché l'onglet "Enable IONI USB Configuration" sous le logiciel SIMUCUBE avant de vouloir te connecter à la IONI via Granity ? Et sinon, çà fonctionne sous SIMUCUBE ?
Hier soir passage du pote qui vient tourner de temps en temps avec mon système. Je ne lui avait fait essayer jusqu'à lors que le combo avec MMOS. Hier soir sur Automobilista avec l'Ultima GTR, direct il me dit sans que je ne lui demande rien : "le FFB est vachement plus souple, moins haché, saccadé,çà rend beaucoup mieux". Confirmation de mon ressenti, la force est toujours réglée aussi forte que précédemment, mais le logiciel de GD donne un rendu FFB beaucoup plus lissé et souple dans les transitions avec les pics de force. D'ailleurs il rattrapait les travers très naturellement... Et je ne suis toujours qu'avec le malheureux encodeur 2500ppr ![]()
Sinon, Beano et consorts, estiment que même le gros MIGE ou les moteurs Lenze et autres qu'il utilisaient précédemment, n'ont pas assez de damping naturel pour contrer les pics FFB sur Iracing. Ils partent désormais sur des moteurs plus gros encore. Sam Maxwell teste ainsi un Kollmorgen AKM 73L dont il tire avec une IONI Pro HC plus de 60Nm... ![]() Les fous, va y avoir du bras cassé...
Les fous, va y avoir du bras cassé... 
Ils estiment que le Damping généré par les logiciels, Simucube ou autre n'est pas aussi bien. Je suis dubitatif...![]() Etienne t'en penses quoi ?
Etienne t'en penses quoi ?
PS : sinon si ils y en a qui veulent jouer les gros bras chez MIGE il y a un moteur qui permet d'atteindre 40NM avec la IONI Pro HC, à prendre en 380V...
http://www.alibaba.com/product-detail…9.f727f826BRk37
Il y a des clients ? ![]()
Je trouve que ça n'a pas de sens de prendre un plus gros moteur pour avoir plus de damping. De toute façon sur un brushless, la friction est extrêmement faible, et ce n'est pas la taille qui va l'augmenter. La seule chose qui va augmenter avec la taille c'est l'inertie, mais à ce compte là mieux vaut rajouter des masselottes à sa roue.
Mais je ne vois pas l’intérêt d'augmenter l'inertie du moteur. Si l'inertie sur une vraie direction est plus élevée par rapport à celle d'un DD (pas fait le calcul mais c'est probable), il suffit de l'augmenter par logiciel, ça coûte moins cher et ça pèse moins lourd. Avec un rafraîchissement de l'effet élevé et un encodeur assez précis, il y a moyen d'obtenir une inertie artificielle de très bonne qualité.
Par contre je suis d'accord que sur un Direct Drive il faut augmenter la friction/damping de base, car elle est trop faible par rapport à une vraie direction à vide, et qu'elle permet de aussi limiter les instabilités.
Quant au damping, le plus proche tu es de l'asservissement, le meilleur effet de damping tu aura. Le plus éloigné tu es, le plus de lag tu aura, plus faible la fréquence de rafraîchissement sera, plus basse sera la limite du damping max que tu peux réaliser, et plus basse fréquence la résonance sera (d'où le notch filter qu'ils ont rajouté pour atténuer cet effet).
Et si c'est le jeu qui décide de calculer son damping, au lieu de laisser le fw le gérer proprement, et bien à 60 Hz le damping/friction max va être fortement limité. Au delà d'une valeur seuil d'intensité d'effet damping/friction le volant va rentrer en auto-oscillation, à une fréquence qui va dépendre entre autre de l'inertie. L'inertie va aussi modifier le seuil d'intensité max, et c'est peut être de là que vient l'idée d'augmenter l'inertie pour augmenter ce seuil.
Quand je lis "fake effect" sur tout ce qui touche à autre chose que la force constante, j'ai envie de réagir, mais il faudrait un article assez long et matheux pour expliquer pourquoi il n'y a pas de "fake effects" à mon sens, juste des gens qui ne comprennent pas ce qu'est un système, un asservissement en boucle fermée, une fréquence de résonnance....
Eh bien explique, moi ça m'intéresse. ![]()
Etienne : C'est là...
https://community.granitedevices.com/t/projektti-mo…an-dd-wheel/806
En tout cas très claire ton explication elle est... ![]()
Vu la fréquence de rafraichissement des jeux hors Iracing, le damper géré par la simulation peut donc être de très bonne facture, tout comme d'ailleurs le damping géré par la Simucube hors jeu... Bref hors le motif d'avoir plus de Nm pas besoin de prendre ces moteurs si je comprends bien...
Edit : pour ce qui est des "fake effects", je prends par exemple, une route sur RF1 en 3D toute plate donc sans relief. On pouvait intégrer dans les paramètres du circuit un rendu de bosses de manière aléatoire indépendant du tracé réel du circuit, ce qui fait que ces micros bumps d'un passage à l'autre ne se trouvent pas au même endroit. Pas très réaliste tout çà. C'est ma définition du "Fake effect" qui ne coïncide pas avec le revêtement 3D... Mais il est sur que le système FFB le gère en temps réel tout comme tout autre rendu FFB donné par le jeu...
Eh bien explique, moi ça m'intéresse.
Je ferais ça un de ces 4, quand/si je me remet à bosser sur le FFB. Pour faire ça bien c'est long, et là pour le moment je suis à fond sur autre chose ![]()
Pour résumer:
idéalement pour rendre un FFB parfaitement, il faudrait un jeu qui rafraîchit à une fréquence infiniment élevée (instantanément quoi), en envoyant des valeurs de couple avec une précision infinie, et en récupérant la position immédiatement et aussi avec une précision infinie (et bien sûr il faut que le calcul de la force développée dans le pneu soit calculée parfaitement).
Comme aucune de ces conditions n'est possible, on est donc obligé ce tricher en envoyant les infos de couple à une fréquence finie (de 60 Hz à quelques centaines de Hz en pratique), avec une résolution finie (moins de 15 bits avec l'effet de force constante qui est codé entre -10000 et 10000), de récupérer la position avec une précision finie également (16 bits sur toute la plage de rotation de la roue), avec une latence de quelques centaines de µs à plusieurs ms.
En fonction de comment la physique est calculée, ces contraintes peuvent être source de vrais problèmes, en particulier d'instabilités dues aux latences (délai entre le moment où le couple est envoyée + celui ou la position est récupéré). Ces latences proviennent du passage par la couche DirectInput, USB, FW, etc...
Lors de mes développements sur les modèles de pneu et sur les calculs de FFB dans mon moteur de jeu, j'ai essayé l'approche "Force constante" uniquement, mais je n'ai jamais réussi à avoir un truc stable. Donc j'ai décidé de décomposer la force au niveau du pneu en plusieurs forces, afin de laisser le soin au volant de gérer correctement les effets liés à la vitesse (de rotation du volant). Sur n'importe quelle bagnole, quand vous êtes à l’arrêt, si vous tournez un peu le volant il revient à sa position initiale (effet ressort), sans osciller car il y a aussi la friction dans le système. Quand vous roulez, il y a toujours une certaine élasticité et friction du pneu + d'autres effets qui rentrent en compte.
Je ne suis pas au niveau d'iRacing en terme de physique ou de FFB, mais pour moi il est impossible d'avoir la qualité de rendu d'une friction gérée par le drive ou la carte entre le pc et le drive en utilisant uniquement la force constante.
Sur n'importe quelle voiture, quand vous roulez en ligne droite, vous pouvez lâcher le volant, la voiture va rester stable. Idem si vous tournez un peu le volant, la voiture et le volant doivent se stabiliser. Combien de jeux se comportent comme ça (avec des réglages FFB "corrects") ?
Le problème de l'approche "décomposition en effets" est que le jeu n'a aucun moyen de savoir comment sont réglés les gains des effets sur le volant, donc il perd la maîtrise de l'équilibre entre les différents effets. Avec l'approche "force constante uniquement", il suffit juste de savoir le coefficient qu'il y a entre la couple envoyé à DirectInput et le couple réellement produit sur le moteur, le jeu n'est alors plus dépendant des réglages du fabricant du volant ou de l'utilisateur (à ceci près qu'à connait pas le couple exercé par le pilote, ni l'inertie et la friction du vrai volant à priori)...
Donc à chacun de voir, mais pour moi un simu où tu ne peux pas lâcher le volant sans qu'il parte en oscillation c'est pas glop (surtout quand le volant peut sortir 20 Nm!). Rajouter un filtre "bouchon" pour atténuer ces oscillation n'est pas une solution idéale, car cela va forcément supprimer du FFB dans certaines situations où ça ne devrait pas. C'est comme si sur une chaîne hifi pour éliminer le 50 Hz du secteur on met un filtre au lieu de faire des alims propres.
Cela dit on est bien obligé de faire ce qu'on peut avec ce que fournissent les jeux, les développeurs ayant chacun des contraintes différentes en fonction du moteur de physique qu'ils utilisent.

Etienne : C'est là...
https://community.granitedevices.com/t/projektti-mo…an-dd-wheel/806
En tout cas très claire ton explication elle est...
Vu la fréquence de rafraichissement des jeux hors Iracing, le damper géré par la simulation peut donc être de très bonne facture, tout comme d'ailleurs le damping géré par la Simucube hors jeu... Bref hors le motif d'avoir plus de Nm pas besoin de prendre ces moteurs si je comprends bien...
Edit : pour ce qui est des "fake effects", je prends par exemple, une route sur RF1 en 3D toute plate donc sans relief. On pouvait intégrer dans les paramètres du circuit un rendu de bosses de manière aléatoire indépendant du tracé réel du circuit, ce qui fait que ces micros bumps d'un passage à l'autre ne se trouvent pas au même endroit. Pas très réaliste tout çà. C'est ma définition du "Fake effect" qui ne coïncide pas avec le revêtement 3D... Mais il est sur que le système FFB le gère en temps réel tout comme tout autre rendu FFB donné par le jeu...
Je n'ai pas lu le post de Beano jusqu'au bout, je me suis arrêté à "I was searching for a servo that would provide natural damping due to higher inertia". Donc en gros il confond friction et inertie, qui sont 2 notions physiques opposées, ou alors je n'ai pas compris ce qu'il cherche à faire. J'imagine que le principe est d'augmenter l'intertie pour diminuer l'amplitude des oscillations et le seuil d'instabilité pour les effets liés à la vitesse, mais je ne suis pas convaincu du tout par la solution. L'inertie et le Damping peuvent être réalisée par l'Ioni avec une bonne qualité, pourquoi vouloir le faire mécaniquement ? (en plus électriquement c'est réglable).
Pour info, le damping dans l'ioni est raffraichi à plusieurs milliers de Hz (bon ça dépend aussi de l'encodeur, moins l'encodeur est précis moins on peut monter en fréquence et plus haut est le seuil de vitesse qui va "déclencher" l'effet. Comparez ça aux 60 Hz de iRacging (il me semblent qu'ils ont augmenté récemment, mais ça reste inadapté).
Pour le cas que tu décris, effectivement si le bruit généré n'est pas répétable à chaque tour c'est pourri.
Mais quand je lis un peu partout "fake effects", en général ça parle de l'effet spring ou damper/friction...
Tu as raison, moi même à tord, j'ai pu parler de "fake effect" pour l'effet damper utilisé véhicule à l'arrêt dans AC, alors que finalement cet effet permet de simuler de manière réaliste le frottement du pneu sur l'asphalte...
On pourrait tout aussi bien parler de l'effet "vibreurs" dans AC qui permet de simuler le ressenti vibreur alors que celui-ci en 3D est plat grâce à un effet "sine" (pour le nom de l'effet je ne suis pas sur... ![]() ). Le rendu sera toujours le même à chaque tour et je l'utilise pour rendre le volant plus vivant sur lesdits vibreurs.... Par contre pour l'effet "route" j'ai bien peur qu'il fonctionne comme RF1, il vaut mieux donc l'oublier...
). Le rendu sera toujours le même à chaque tour et je l'utilise pour rendre le volant plus vivant sur lesdits vibreurs.... Par contre pour l'effet "route" j'ai bien peur qu'il fonctionne comme RF1, il vaut mieux donc l'oublier...
salut tous le monde
bon grâce a vous j'ai cramer le mige la ioni la simucube et le chrono haha ![]()
j'ai suivi cette vidéo de A a Z pour installer le tout, aucun problème tous va bien ![]()
pour les réglage j'ai garder les même que sur mmos, pour éviter tous problème, par contre il y a quelque réglage que je connais pas
comme :
simucube force reconstruction filter : 4
Torque bandwidth limit : 1000HZ
center frequency hz : 60 HZ
attenuation db : infinite (notch filter)
q factor : 0,1
pour le reste tous et a zero
pour le moment j'ai fait que 5 tour, le ffb et plus doux, quand je tourne le volant a 90 Degrés sur un vibreur j'ai l'impression de mieux ressentir les chose, et j'ai même amélioré mon chrono d'un dixième sur spa ![]()
a oui je roule sur iracing
je commande l'encodeur chez simracingbay dans l'aprem
merci encore a ceux qui prenne le temps de nous aider, même si au final j'en et pas eu de besoin 
simucube force reconstruction filter : 4
c 'est le niveau de filtrage , ça va jusqu' 9 ou 10 je sais plus
As tu bien coché l'onglet "Enable IONI USB Configuration" sous le logiciel SIMUCUBE avant de vouloir te connecter à la IONI via Granity ? Et sinon, çà fonctionne sous SIMUCUBE ?
![]() OK faut donc valider une option pour rentrer dans Granity.
OK faut donc valider une option pour rentrer dans Granity.
Je retourne essayer ça !!
Sinon pour la course au couple, ça ne serait pas un bon vieux concours des familles "A celui qui a la plus grosse ??" ![]()
BAM HORNET : Force reconstruction filter sert à lisser le rendu FFB du jeu directement par la IONI, c'est le gros plus de ce logiciel... Pour Iracing il a été optimisé en le mettant sur 5.
Torque limit Banwitch : là temps que ton moteur ne rentre pas en résonnance tu fais monter autant que tu peux. Pour les autres filtres ils sont là pour limiter par exemple l'oscillation à l'arrêt du volant si j'ai bien compris, surtout utile avec Iracing et son taux de raffraichissement moisi à 60Hz. Tu trouveras des réglages sur les forum Iracing... Pour les autres jeux normalement pas besoin de les utiliser... En tout cas je n'en ai pas ressenti le besoin sur mon moteur.
Pascal 71 : en effet je crois qu'il y a un peu de çà... ![]()