

je suis pas d'accord pour le fait de 3 moteurs sont équivalents a 4 car tu n'a pas les mêmes possibilités en terme d'angles

DIY - [Tuto] conception d'un simulateur dynamique
-
-
c'est un bon sujet de discussion, pourquoi ?
sur 3 vérins comme tous les simulateurs 3 DOF je vois pas trop ce qui limite.
avec les 3 vérins tu peux faire le même déplacement .
je suis même pas sur que le jeux soit capable de te donner des infos de mouvement des roues aux 4 extrémités.
simtools donne une position dans l'espace pas la position des roues indépendamment ?
tu peux regarder et comparer les vidéos, il ce passe rien de différent entre un 4 vérins et un 3 moteurs.
je pense que ce concept de mettre 4 vérins est venu de IMS , un des premier a utiliser 4 vérins sur un chassis et ça pour un soucis de stabilité uniquement.
au départ DBOx avait 2 vérins, puis 3 , IMS en a mis 4 , tous les autre ont fait pareille !
faut dire que 4 vérins ça rapporte plus !
https://gizmodo.com/312495/d-box-g…costs-a-fortune
External Content youtu.beContent embedded from external sources will not be displayed without your consent.Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy.External Content youtu.beContent embedded from external sources will not be displayed without your consent.Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy.la gestion du mouvement ce fait vraiment par rapport au centre de rotation, il faut inverser les mouvements AV/Ar et G/D des 2 avant et 2 arrière.
Avec 3 vérins c'est la même chose mais avec 3 .
du point de vu du centre de rotation je vois pas ce que ça change.
mais je suis curieux d'une explication , je suis peut être dans l'erreur .
-
Oui dans cas 750w ça risque d’être juste. Et plus le pas est important plus il faut de couple. Dans ce cas la charge joue aussi un rôle. Je n’ai fait que de très rapides calculs sans plus de réflexion. Cependant nos amis Ricardo et Rider ont opté pour des réductions ce qui augmente le couple, ce n’est pas du au hasard
")
Cependant avec un pas de 25mm et la puissance qui va avec ça doit être super réactif.
Le fait de mettre trois moteurs en triangle équilatéral permet des angles plus importants !
-
Avec 4 pieds aux 4 coins, il faut des calculs nickels pour rester dans le même plan...
oui, ça répartit la charge et ça la réduit de 25% par rapport à 3
mais en effet à part ça, je vois pas trop l'intérêt... Keep it simple
-

Le fait de mettre trois moteurs en triangle équilatéral permet des angles plus importants !
ah oui ça c'est clair ! évidement , ou éventuellement plus proche
Avec 4 pieds aux 4 coins, il faut des calculs nickels pour rester dans le même plan...
oui, ça répartit la charge et ça la réduit de 25% par rapport à 3
mais en effet à part ça, je vois pas trop l'intérêt... Keep it simple
et ça fait vendre un vérin en plus !!

de toute manière ça ce gère pas via simtools ou autre.
-
Oui dans cas 750w ça risque d’être juste. Et plus le pas est important plus il faut de couple. Dans ce cas la charge joue aussi un rôle. Je n’ai fait que de très rapides calculs sans plus de réflexion. Cependant nos amis Ricardo et Rider ont opté pour des réductions ce qui augmente le couple, ce n’est pas du au hasard
Cependant avec un pas de 25mm et la puissance qui va avec ça doit être super réactif.
faudrait vraiment tout bien calculer, car je pense que ça va être juste en couple ...
ce qui fait peur c'est que trop vite peut aussi être un soucis .
après faudra baisser la vitesse moteur si c'est trop rapide
plus il y a de pas plus c'est rapide et moins y a de couple ?
donc pour avoir du couple faut diminuer le pas c'est ça ?
-
effectivement après vos remarques j'étais dans l'erreur

mais psychologiquement je préfère 4

-
bas moi financièrement je préfère 3 !!

du coup tu peux monter en gamme sur les moteurs

-
-
Qd on pense AXÉ on pense au cul du pilote ... puis ça secoue moins que les amortisseurs
")
Merci pour toutes vos infos les gars et au plaisir de lire vos aventures et explications

-
IMS n'a rien inventé...
Les systèmes DBOX à 4 vérins existaient déjà avant même qu'ils se décident à faire des simulateurs, puisqu'au départ DBOX faisait et fait toujours des systèmes pour le cinéma. Et 3 vérins pour mettre sous un canapé ça le fait moyen.
Par contre au niveau stabilité, et surtout répartition du poids, c'est plus difficile sur 3 vérins de bien répartir le poids.
Avec 4 pieds aux 4 coins, il faut des calculs nickels pour rester dans le même plan...
Oui, je pense qu'il faut plusieurs années de R&D pour trouver la formule, et au moins un core I7 à 4Ghz pour le faire en temps réel



-
Je ne voulais lui attribuer aucune gloire
C’est juste pour expliquer quand on a commencé de voir / passer à des simu voitures à 4 vérins.
Je ne suis pas certain qu’on voyait avant qu’il le fasse des simu voitures sur 4 vérins à cette date?
Avant il y avait des Simu Dbox 3 vérins
Et je crois que les fauteuils individuels de cinéma sont sur 3 vérins .
Mais les canapés sur 4 .
Vous êtes moqueur
, vous avez qu’à vous forcer un peu pour nous faire ces calculs , vous y mettez vraiment pas de bonne volontéet puis des 6dof avec un ou 2 vérins en plus ça serait plus stable aussi
-

Richard, ton montage est vachement compliqué niveau montage, pièces .... et coût.
J'ai fait un prototype avec les moyens du bord. Il y a pas mal de pièces usinées ce qui complique un peu les choses.
Maintenant que j'ai une imprimante 3 D il est possible que je puisse réaliser certaines pièces.
En regardant le prototype je me dis qu'il y a des améliorations et des modifications à faire pour réduire le travail d'usinage.
La poussée du vérin est 154 kgf et la vitesse maxi de 409 mm/s
.
Ce lien vous donnera plus de précisions :
http://autogire-rc.over-blog.com/article-constr…-123429772.html
-
 Avec 3 ou 4 pieds (vérins) de ce type, il y a un soucis d'hyperstatisme : dés que le chassis du simulateur penche à droite à gauche en avant ou en arrière, les pieds rotules ne suffisent pas pour assurer le bon déplacement de l'ensemble sans forcer radialement sur les guides linéaires des vérins, les vérins ont tendances à fléchir, à moins qu'il y ait beaucoup de jeu dans les guidages ? ou alors les pieds se déplacent légérement?c'est vrai que le faible déplacement des vérins limite un peu cet effet qui sera compensé par le jeu dans les vérins et dans les rotules ...
Avec 3 ou 4 pieds (vérins) de ce type, il y a un soucis d'hyperstatisme : dés que le chassis du simulateur penche à droite à gauche en avant ou en arrière, les pieds rotules ne suffisent pas pour assurer le bon déplacement de l'ensemble sans forcer radialement sur les guides linéaires des vérins, les vérins ont tendances à fléchir, à moins qu'il y ait beaucoup de jeu dans les guidages ? ou alors les pieds se déplacent légérement?c'est vrai que le faible déplacement des vérins limite un peu cet effet qui sera compensé par le jeu dans les vérins et dans les rotules ...une idée pour la solution à 4 vérins : 1 pied fixe sur rotule et les 3 autres sur roulette sphérique ?
Voyez le croquis et le soucis avec seulement 2 pieds vérins (c'est un peu moche et un peu bordélique mais bon ...
), j'ai exagéré l'inclinaison du chassis pour se rendre compte du problème. Ca peut donc augmenter le bruit, et aussi l'usure ... etc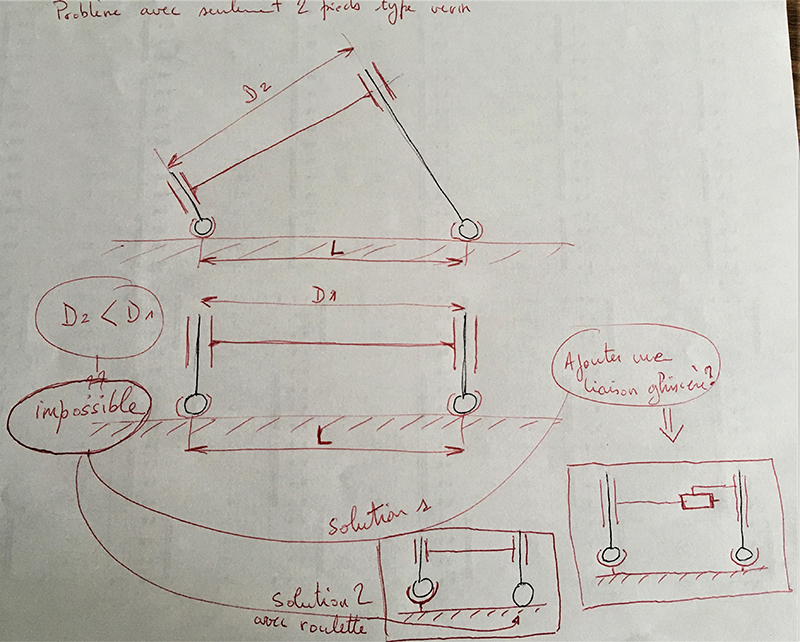
-
Non il n'y a aucun jeu, ni dans les guides, ni dans les rotules. Et je ne vois vraiment pas pourquoi il en faudrait si les calculs sont faits comme il faut.
External Content www.youtube.comContent embedded from external sources will not be displayed without your consent.Through the activation of external content, you agree that personal data may be transferred to third party platforms. We have provided more information on this in our privacy policy.Au début de la vidéo on voit un peu les supports bouger, mais à mon avis c'est plus à cause des vibrations. Normalement les supports/rotules pourraient être vissés dans le sol sans aucun problème.
-
 Avec 3 ou 4 pieds (vérins) de ce type, il y a un soucis d'hyperstatisme : dés que le chassis du simulateur penche à droite à gauche en avant ou en arrière, les pieds rotules ne suffisent pas pour assurer le bon déplacement de l'ensemble sans forcer radialement sur les guides linéaires des vérins, les vérins ont tendances à fléchir, à moins qu'il y ait beaucoup de jeu dans les guidages ? ou alors les pieds se déplacent légérement?c'est vrai que le faible déplacement des vérins limite un peu cet effet qui sera compensé par le jeu dans les vérins et dans les rotules ...
Avec 3 ou 4 pieds (vérins) de ce type, il y a un soucis d'hyperstatisme : dés que le chassis du simulateur penche à droite à gauche en avant ou en arrière, les pieds rotules ne suffisent pas pour assurer le bon déplacement de l'ensemble sans forcer radialement sur les guides linéaires des vérins, les vérins ont tendances à fléchir, à moins qu'il y ait beaucoup de jeu dans les guidages ? ou alors les pieds se déplacent légérement?c'est vrai que le faible déplacement des vérins limite un peu cet effet qui sera compensé par le jeu dans les vérins et dans les rotules ...une idée pour la solution à 4 vérins : 1 pied fixe sur rotule et les 3 autres sur roulette sphérique ?
Voyez le croquis et le soucis avec seulement 2 pieds vérins (c'est un peu moche et un peu bordélique mais bon ...
), j'ai exagéré l'inclinaison du chassis pour se rendre compte du problème. Ca peut donc augmenter le bruit, et aussi l'usure ... etcTu as raison ton dessin le montre bien, j’ai eu ce soucis sur mon 3dof que j’ai compensé par des fixations mobiles .
Je pense que là ça glisse sur la coupole au sol.
Le bout des vérins est rond, la coupole creuse, la faible course doit permettre de gommer le défaut.
La diagonale est toujours plus longue .
C’est L qui change
C’ est facile à voir avec une chaise , tracer les pieds au sol, l’incliner sur 2 pieds et projeter l’ext Du pied/ vérin au sol, la distance augmente.
Les vérins sont fixe sur le châssis, normal.
-

Au début de la vidéo on voit un peu les supports bouger, mais à mon avis c'est plus à cause des vibrations. Normalement les supports/rotules pourraient être vissés dans le sol sans aucun problème.
Non, pas possible que les supportt soient vissés dans le sol... , superbe vidéo
! On voit bien les pastilles blanches, surement en téflon, se déplacer dans les "assièttes" noires qui comporte des bordures, c'est justement pour compenser les déplacement radiaux dûs à l'hyperstatisme -
La diagonale est toujours plus longue .
C’est L qui change
c'est ça !
Par contre sur la page d'avant je ne vois pas ce genre de pied sur la vidéo de la personne qui fabrique ces vérins ... je retourne voir
-
Avec les bon déplacement de vérins, je ne vois pas le problème. Et 6", soit 15 cm, je n'appelle pas ça une faible course.
Sur la page d'avant il n'y a pas ce genre de pieds parce que justement il n'y en a pas besoin, il suffit que le bout soit rond et ça fonctionne (mais il y a quand même une friction, donc je pense qu'il vont s'user assez vite, tout dépend des matériaux)
-
Pas de problème puisque c’est pas fixé au sol et que tout est rond en Téflon pour bouger et compenser.
15cm de course ça doit commencer à faire un écart dans les coupoles , mais pas au point d’en sortir.
-
